











艾利特機器人建筑行業螺桿拉拔應用
2024-07-30

艾利特機器人建筑行業螺桿拉撥應用
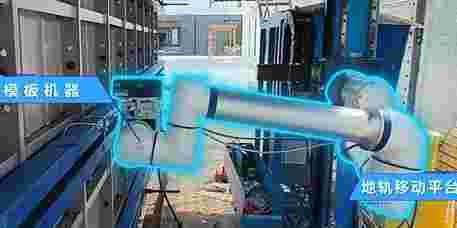
用于建筑施工的外墻模板開合的軌道移動式機器人
采用艾利特CS612搭載3D視覺相機
可實現螺桿、背楞等特征的識別和定位,誤差僅2mm
并根據3D相機的坐標定位控制機械臂依次拔出螺桿,拉拔背棱
同時系統配置激振系統實現開合模工藝
末端的力反饋功能可自動判別風險,提前預警
全程無需人工額外干預
節省了1名工人
全過程自動執行,拉拔螺桿速度快于傳統人工施工
大大降低了事故發生的概率














