EC機器人用戶PLC版一鍵啟動
1 簡述
一鍵啟動功能可以通過用戶 PLC 關聯(lián)相應的系統(tǒng)變量來實現(xiàn)控制機器人的復位,上伺服,精確模式標定,跳主程序,啟動運行等,相對于通過操作示教器啟動機器人運行更便捷。
2 功能實現(xiàn)所需變量
2.1 觸發(fā)信號
觸發(fā)信號可以是外接按扭觸發(fā),(DI)輸入信號。
也可以外部PLC信號觸發(fā)。
2.2 虛擬反饋變量
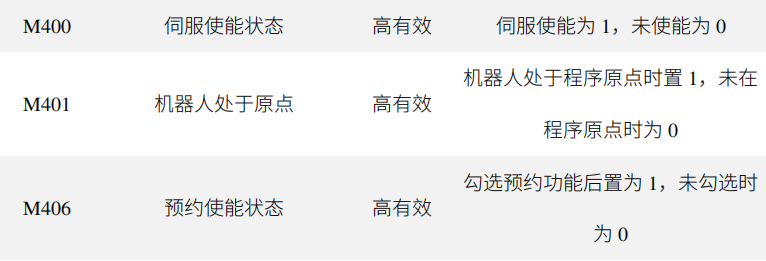
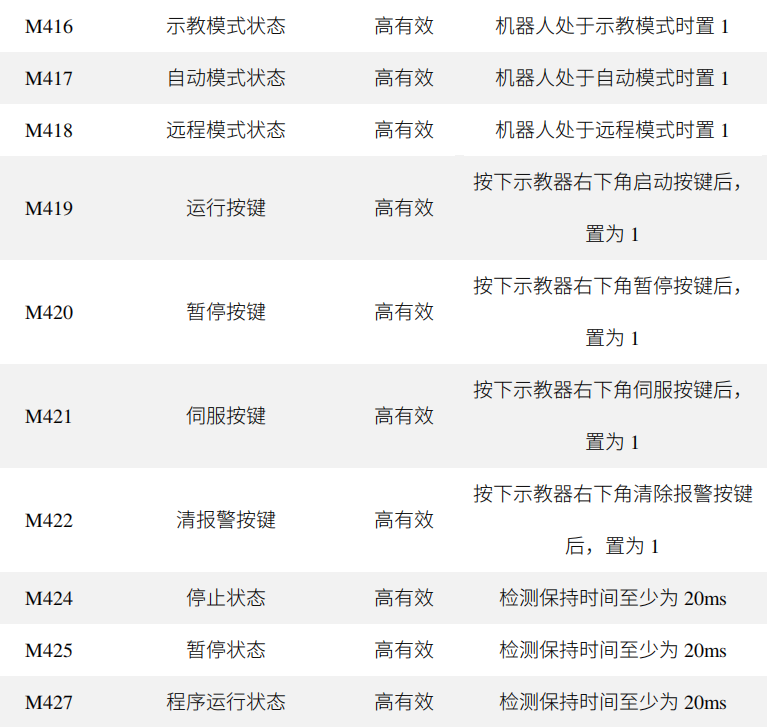
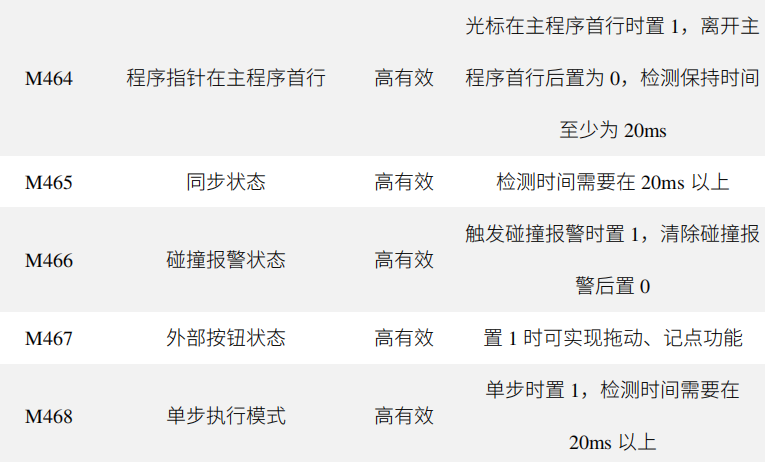
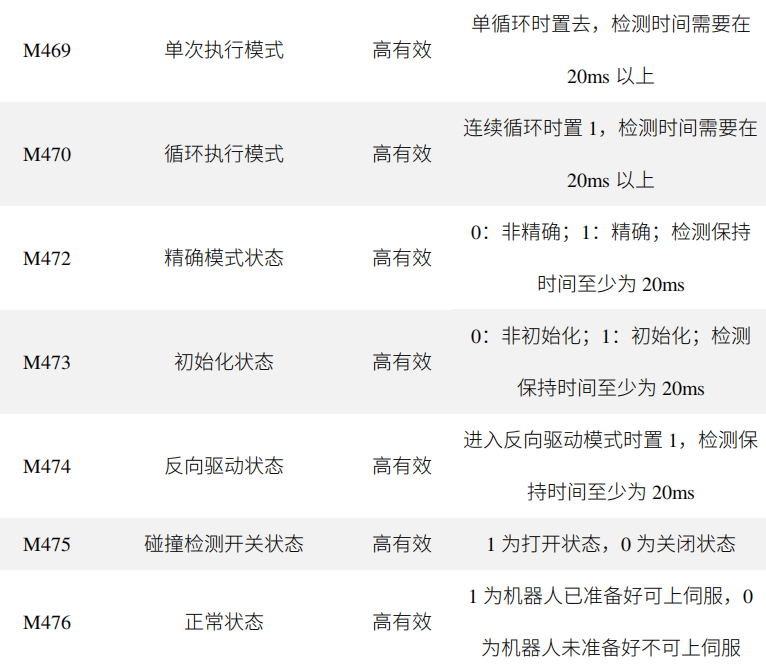
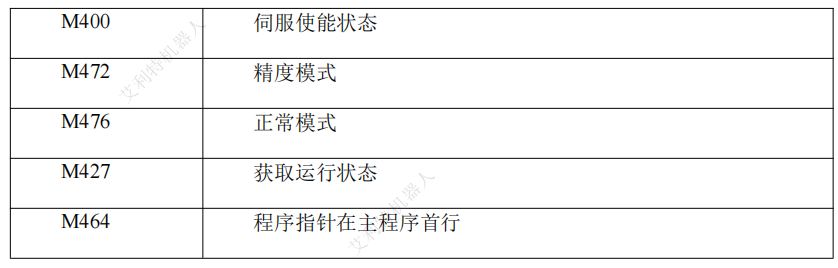
以下變量在用戶手冊附件里面查錄相關作用
虛擬變量(M變量)
以下信號在用戶PLC里面查錄相關功能:
PLC信號映射(S變量)

3 操作步驟
3.1 設置主程序
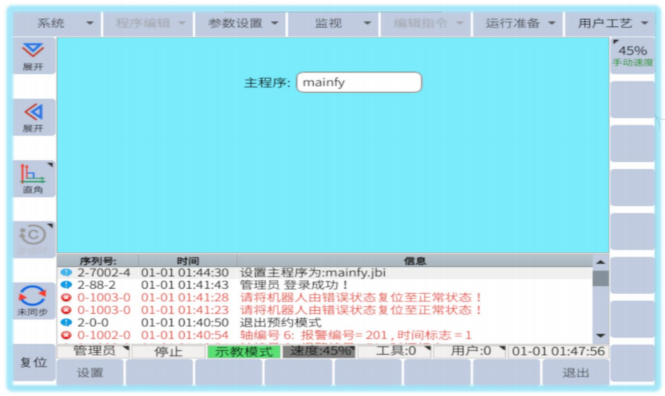
將 mianfy.jbi 設置為主程序。設置路徑 運行準備→主程序,如下圖所示:
主程序選擇

選擇 mianfy 后點擊屏幕左下角的設置按鈕,設置完成后信息框提示“設置主程序
為:mainfy.jbi”
3.2 寫入用戶PLC
用戶PLC是一個始終在后臺運行的PLC程序,PLC 使用梯形邏輯,這是一種可視化編程語言。每行稱為一個梯級,按照梯形圖從上至下、從左至右的順序執(zhí)行。一旦梯形圖的所有梯級都執(zhí)行完畢,PLC 程序將返回頂部梯級并再次執(zhí)行程序。PLC 最多支持200 行或梯級。
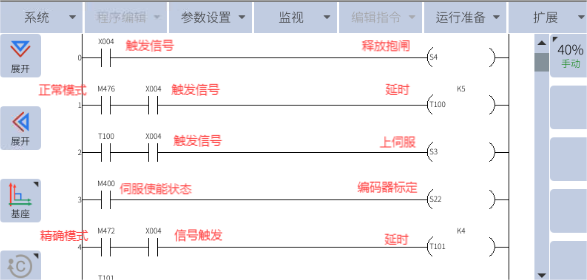
要訪問用戶 PLC,請導航到“ 用戶工藝 -> 用戶 PLC”。
如下圖為一鍵啟動的 PLC 程序。寫入如下PLC程序,X004為外部啟動信號,寫入后保存重啟。
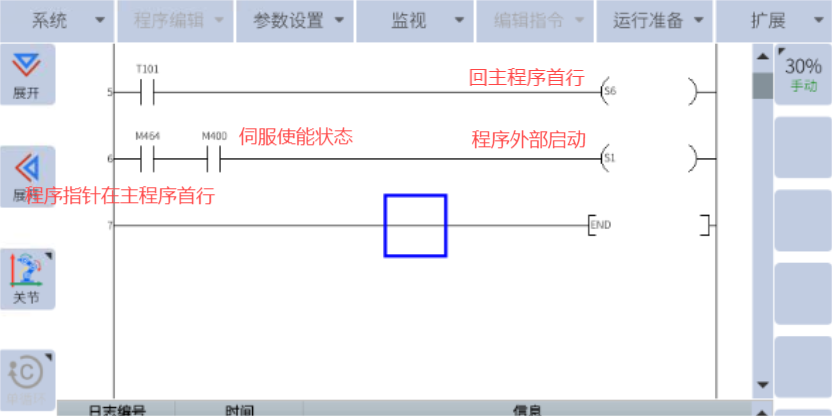
機械臂重啟后,將鑰匙旋轉置遠程模式或者自動模式。
觸發(fā)輸入信號(X004),機械臂即可完成清除報警,抱閘,上使能,標定進入精確模式,運行主程序操作,再次觸發(fā)X004可暫停,如果機械臂報警,觸發(fā)(X004)也可清除報警,回主程序首行運行。
注:以上“X004”是機械臂開機后一鍵啟動的觸發(fā)信號,這個信號可以更改為虛擬信號觸發(fā),也可以外部PLC觸發(fā)。
附錄