











EC機器人常用參數配置
2024-11-06
1. 常用參數配置簡介
常用參數配置包括:IP,負載,重心,安裝方式,機械零點確定,當我們拿到新機時需要做以上配置,確保機器人正常使用。
2. 操作流程
1) . 機器人IP設置
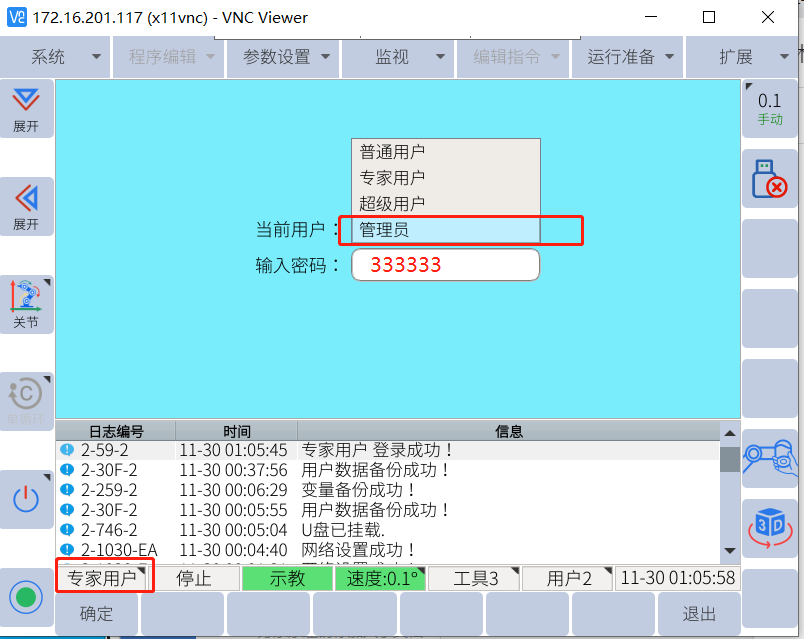
登入管理員模式
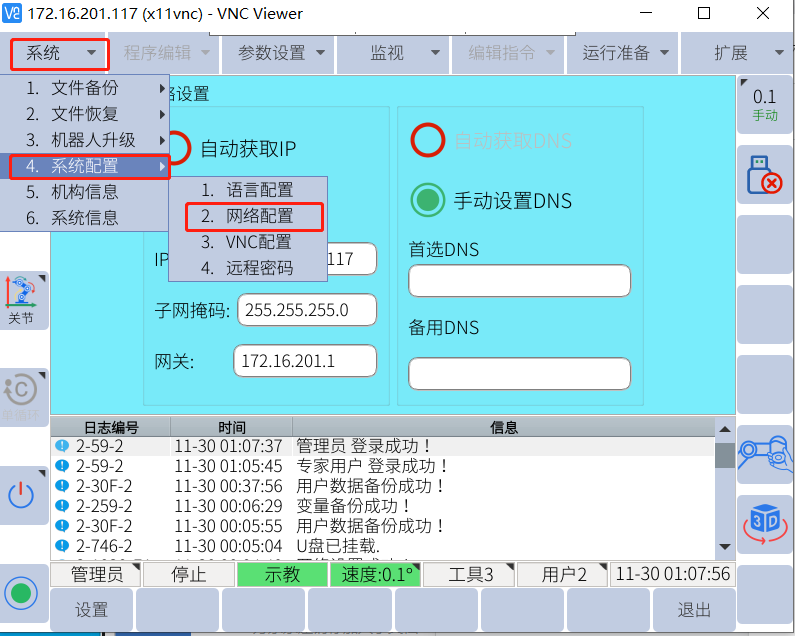
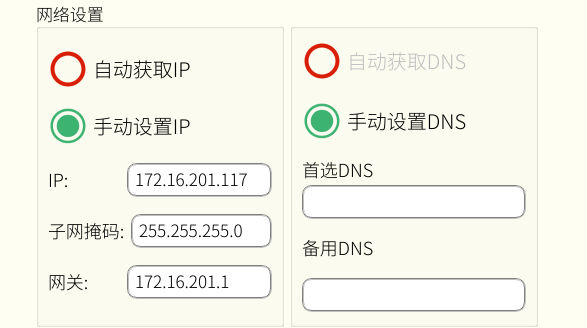
點擊系統--系統配置---網絡配置---輸入IP 子網掩碼 以及網關----輸入完成后點擊設置
2) 負載及重心設置
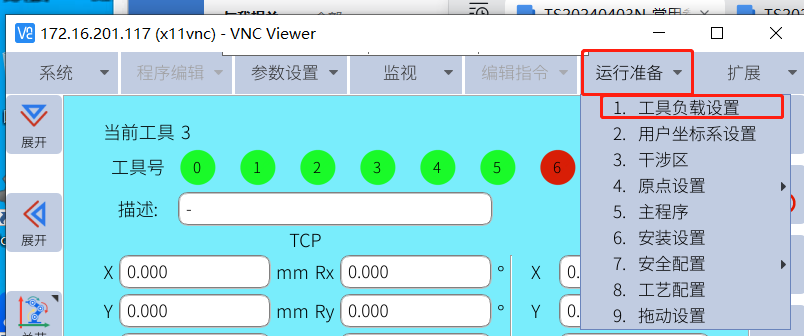
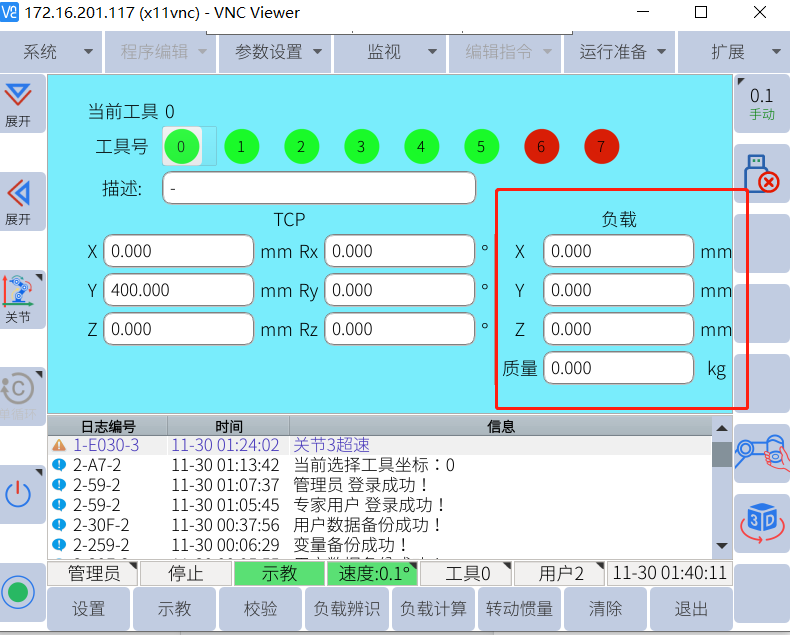
點擊運行準備---工具負載設置,用戶可以同時設置8個不同的工具使用(0-7)。
工具負載和重心的設置:
設置負載重心前首先我們先知道法蘭盤中心點的位置及坐標系方向,EC系列法蘭盤中心點如下圖:

將實際工件+夾爪重量寫入質量中(注意:當工件重量相差很大時,需要在JBI程序中使用“設置負載”指令設置兩段質量,來保證機器人運行穩定。)
將質心設置到X Y Z中(注意:寫入的值為相對于法蘭盤中心坐標的偏差量。)
3) 安裝方式
點擊運行準備---安裝設置---選擇安裝方式,如下圖
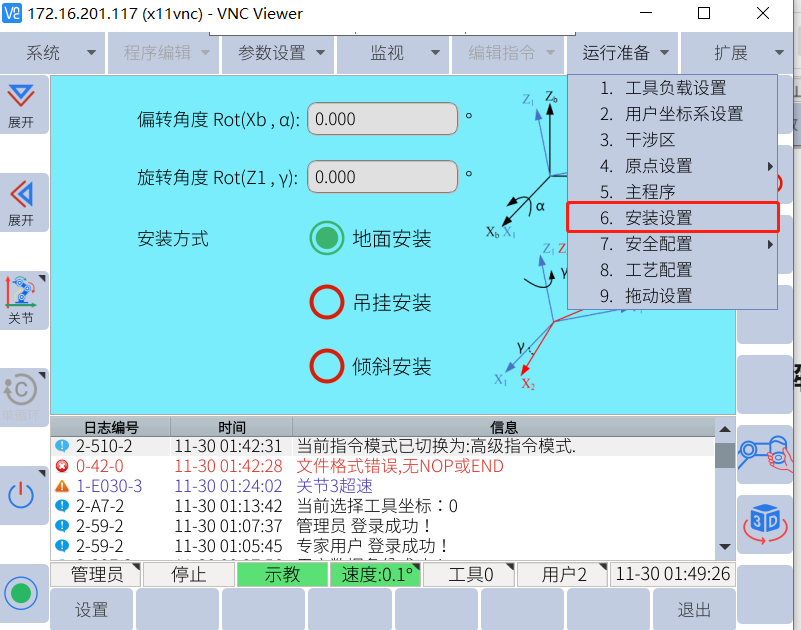
安裝方式有3種:
地面安裝:當機器人基座平行于大地且正裝時,我們需要選擇地面安裝。
吊掛安裝:當機器人基座平行于大地且倒裝時,我們需要選擇吊掛安裝。
傾斜安裝:當機器人基座與大地不平行時,我們需要選擇傾斜安裝。
選擇傾斜安裝時會出現兩個參數:偏轉角度和旋轉角度如下圖:
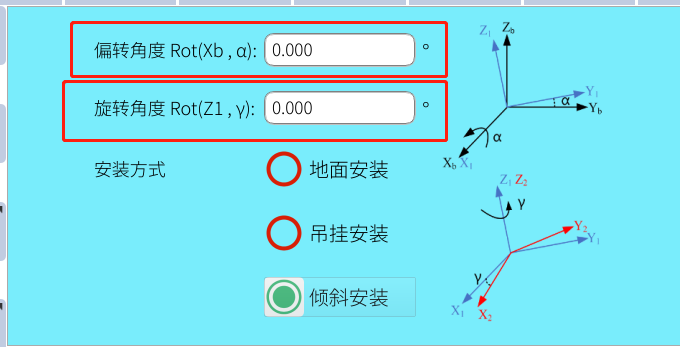
偏轉角度指的是機器人基座平面與大地水平面的夾角α,如下圖:

旋轉角度指的是機器人線纜出線的方向向下時為0度,如果線纜方向不是向下時,那么線纜的朝向與0度時的夾角為γ(范圍0-360度),夾角方向如下圖所示。

4) 機械零點確認
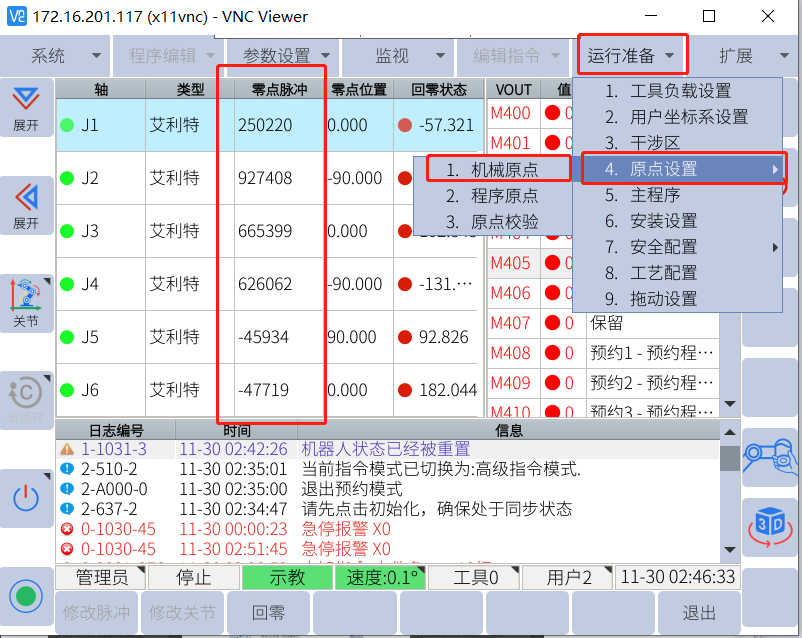
每一臺機器人出廠時已做好零點校準,每臺機械零點脈沖值不同且唯一
登錄管理員模式------點擊運行準備----原點設置----機械原點,如下圖為零點脈沖值。(新機收到后需要拍照保存該界面)
機械零點姿態




























