











CS機器人通信報警排查手冊
1. 簡介
(1)基座通信報警/其他關節通信報警 故障排查步驟
2. 操作流程(現場操作方便程度排序)
通信報警分為基座通信報警,和其他關節通信報警(肘部肩部等)
基座通信報警:
(1):斷電重啟
(2):嘗試升級版本2.12
(3):查看柜子與本體連接線是否松動(航空插頭是否鎖緊)
(4):交叉驗證柜子與本體連接線纜(驗證線纜是否故障)
(5):交叉驗證控制柜(判斷是不是控制柜接口損壞)
(6): 打開基座蓋子內部線纜重新拔插防止松動(內部的通信線松了或者扯到了,運動到一些固定位置的時候,被扯的力最大,可能就是松了,導致通信報警。)
(7):拆開蓋子查看伺服燈狀態(上電有個紅燈會閃。5s后滅就是沒有故障。5s后還閃爍就是機械手故障)
圖2-1
(8):CPU問題(偶發)線程占用過多也會通訊報警(cpu查看方法 及持續維持在70-80%)
原因:循環程序沒有加入sleep 導致死循環
ssh root@fb1的ip -p1022
ssh root@fb2的ip
ssh root@fb3的ip 192.168.54.250
ssh root@ip
登錄進去
top -d 1

(9)末端IO固件故障(這種可以嘗試打開實驗室功能力的 屏蔽工具IO通信 功能,也就是不與末端IO通信。如果是末端IO引起的問題,這樣之后應該就不報警了。也可以升級到最新版本再次驗證問題是否存在。)
(10):控制柜短出線 485-損壞(測量電阻 阻值不大于1是好的)判斷是否是短出線故障
本體與控制柜連接,打開任意關節端蓋,萬用表打到歐姆檔,測量485+與485-電阻是 否在60歐姆左右,偏差太大或太小就有問題.如果有問題,測量兩個相鄰關節之間單線485+,單線485-的阻值,值在1歐姆左右即可
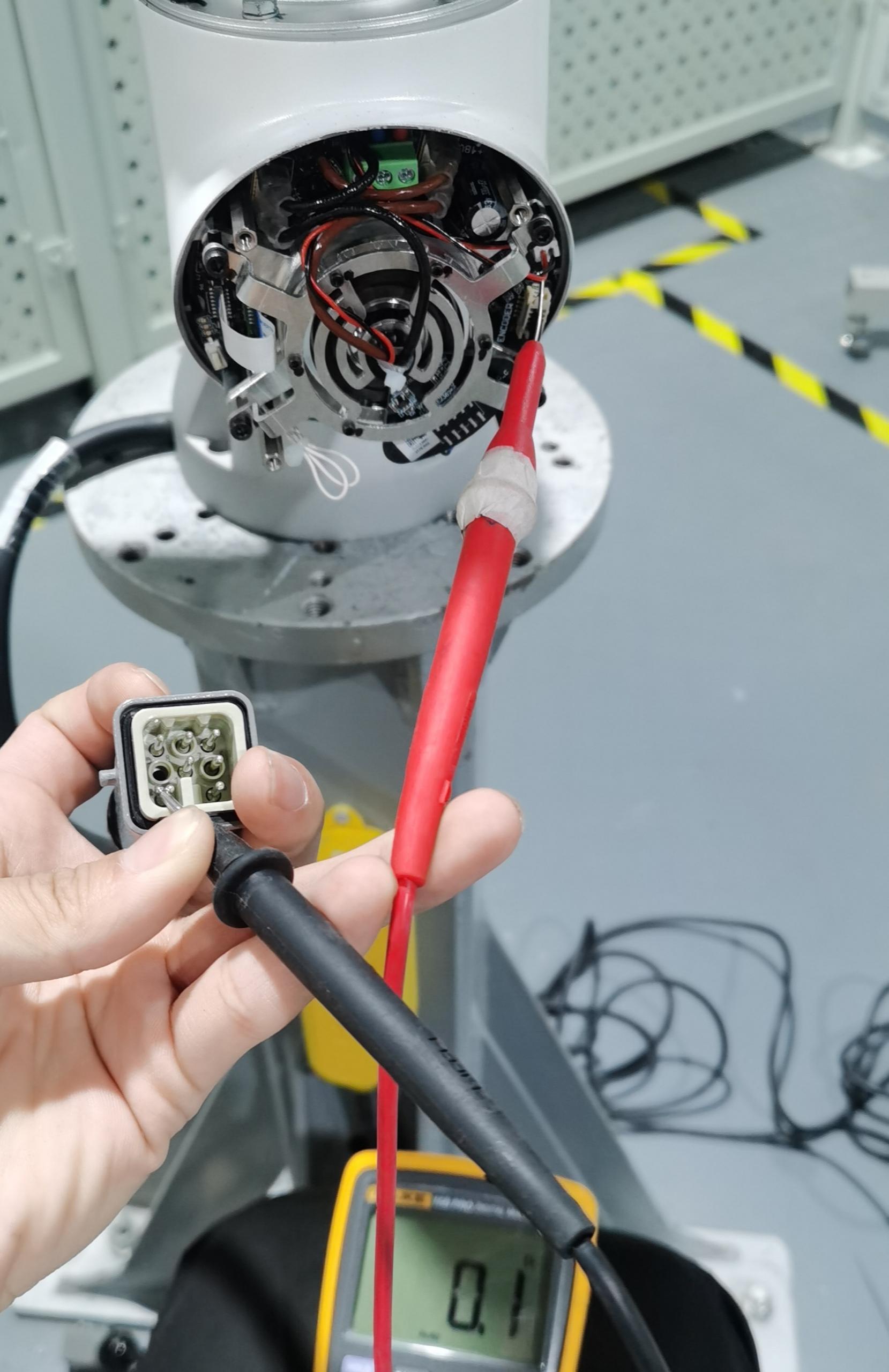
圖2-2

圖2-3
肘部關節通信報警(其他關節):
(11):先嘗試升級機械手臂
(12):斷電重啟
(13):進入專家模式-實驗室模式-48v強制供電-伺服參數是否有數據(無數據可能就是關節故障)
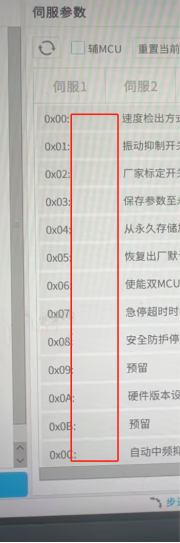
圖2-4
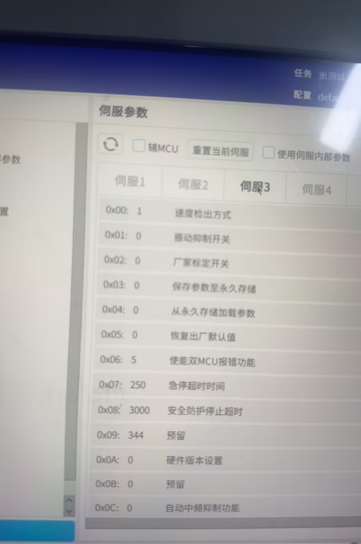
圖2-5
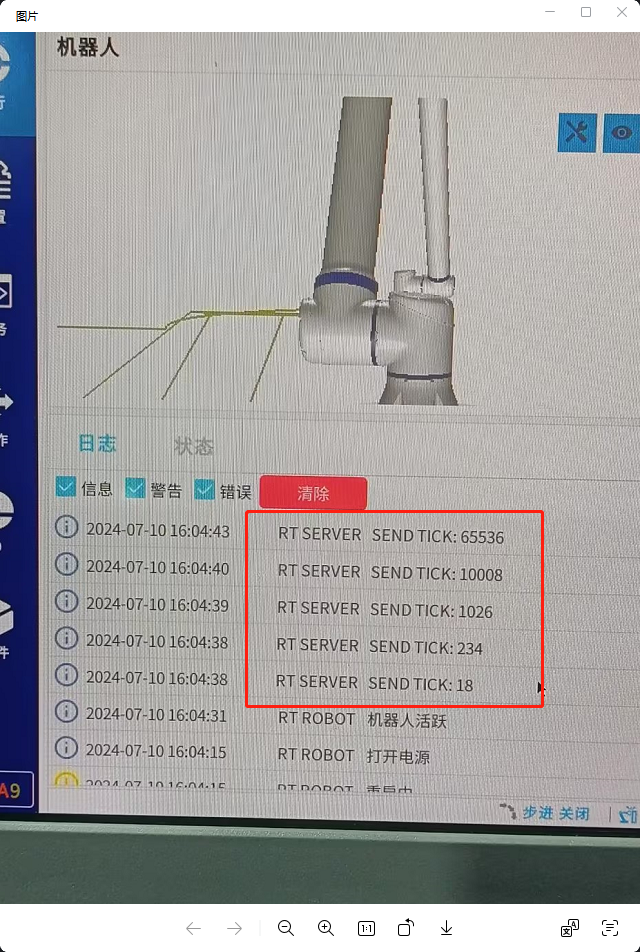
(14)是確實通信質量比較差,不定期的偶發通信,這種可能是硬件存在問題,此類報警如果還伴隨這樣的日志產生,那可以明確通信質量有問題。可以先嘗試通信插拔通信線,航插等接口,然后再驗證是否還存在問題。持續存在的話,可能就是硬件故障了。
3. 常見問題解答
(1)拆端蓋時避免螺絲掉入關節內部,如生產車間粉塵污染較大,不能拆開端蓋,應在無塵車間,避免粉塵污染。


























