











EC機器人奇異點
2025-01-16
1. 簡介
奇異點形成原因:
由于機械限位或軟限位的限制,在其運動空間中會出現逆運動學無解的情況,也就是基于空間坐標的規劃運動無法明確的逆向轉化為機器人各個關節軸的旋轉角度,在機器人工作空間中這些逆運動學無解的點就被稱為“奇異點”。
奇異點的結果:
1.機械臂的自由度減少,從而無法實現某些運動
2.某些關節角速度趨向于無限大,導致失控,引發安全風險
3.無法求逆運算
2. 操作流程
2.1.如何規避奇異點:
1. 在示教點位時,遇到奇異點,使用關節坐標系運動。
2. 在自動運行時,使用movj去規避奇異點。
3. 可提前仿真動作,了解哪里會出現奇異點,從而調試時去規避。
2.2.機器人有以下奇異點:
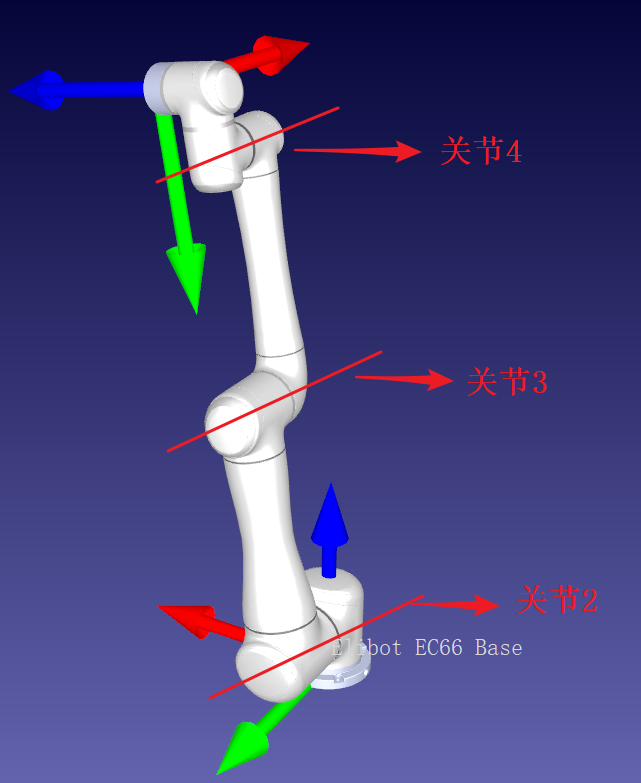
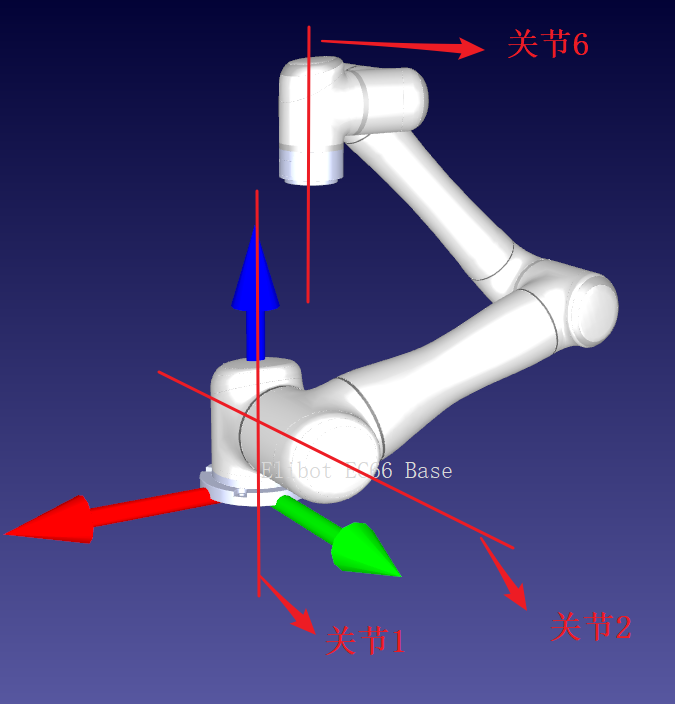
腕關節奇異點:機器人關節4和關節6軸線平行

肘關節奇異點:機器人關節2,關節3,關節4軸線處于同一個平面內
肩關節奇異點:機器人末端中心點位于關節1和關節2構成的平面內
3. 常見問題解答
1. 機器人盡量避免在奇異點附近使用直線運動。
2. 機器人出現奇異點后,可使用關節運動或者拖動移開當前奇異點。
3. 所有能聯動運動的機器人都有奇異點的存在;并且關節越多,奇異點也隨之增加。


























