











EC機器人JBI與LUA交互
隨著技術的不斷進步,根據客戶不同的需求,現在機器人的工作已經不僅僅是簡單的執行運動指令,往往會伴隨著大量的計算和通訊任務。其中通訊用來和外部設備交互,做數據傳輸或一些邏輯控制,而計算則常用來做一些數學運算,進制轉換,機器人的位姿運算等等。
1. EC 系列的 Lua 結構和 JBI 結構
而我們艾利特機械臂采用 jbi 程序+lua 腳本的方式來實現多種符合場景下的使用,將大量復雜的運算、通訊任務和運動程序進行分離,jbi 程序主要負責運動,lua 腳本用來數據運算和通訊交 互。這樣可以保證運動任務的高效運行,不摻雜過多冗余的計算指令,同時腳本內容專一,只 負責后臺運算和通訊。在稍微大型的項目中,分離式的設計不僅可以保證程序的易讀性,同時在編寫過程中也可以多人協作,計算和通訊的驗證和示教點位工作并行進行。這種設計即保證了機器人基礎功能運動指令的簡單插入,同時大大提高了機器人能夠執行任務的上限。 運動和計算的分離式設計,可以避免運動指令和計算指令的大量摻雜,導致調試階段程序 調試效率低不好調試,后期運動程序與計算指令摻雜過多不易維護的情況,這也類似PLC 編程時,往往工程師喜歡用 STL 文本去實現重復復雜的運算指令。同時 JBI 程序搭配類工業風的示教器操作風格可以更快的示教點位,驗證點位,程序調用等,而腳本使用 LUA 語言,可以使工程師無縫從 STL 文本編程切換。在腳本編程中,不僅可以 lua 語言本身的豐富的 API 外,還可以使用艾利特機器人實現的接口,獲取機器人的各種狀態和數據,使用機器人的硬件接口。 從設計角度來說,lua 的執行優先級沒有 jbi 高,但是執行卻是在同步執行的。所以在實際 使用中,lua 和 jbi 程序的執行往往需要互鎖,兩者進行邏輯上的同步,才能達到理想的效果。
2. 如何進行 Lua 腳本和 JBI 程序的交互
2.1 變量

如表格所示,艾利特機器人全局變量分為五種均可通過 jbi 和 lua 進行操作,通常使用情況下,會使用 B、I、D 變量進行 邏輯的交互和簡單數據的傳遞,而 P 變量用作放置關節數據,V 變量用作放置笛卡爾數據。 P 變量和 V 變量存放對應的數據后,可以使用示教器手動移動到目標位置,或者通過移動指令 直接到指定的位置。
2.2輸入輸出
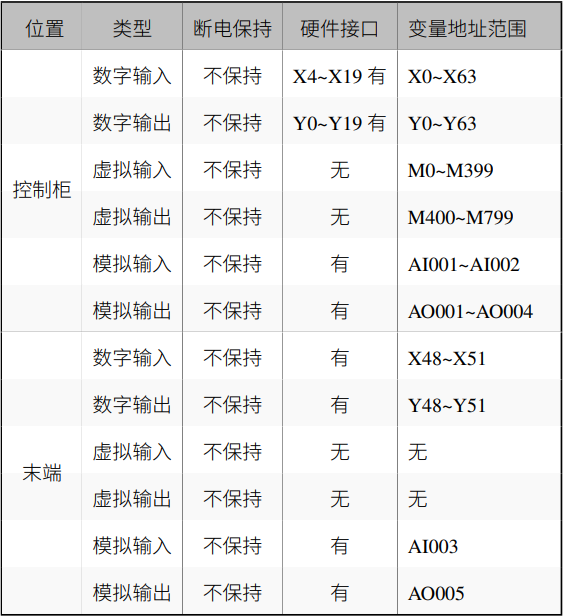
如上表格所示,用戶也可以用數字輸入輸出或者模擬輸入輸出來進行lua與JBI的交互
3.JBI如何操作全局變量
JBI 代碼:
NOP
// 設置全局變量 B0 為 1
SET B000 1
// 設置全局變量 I0 為 1
SET I000 1
// 設置全局變量 D0 為 1
SET D000
// 設置全局變量 P0 的 j1 數據 為 1
SET P000(0) 1
// 設置全局變量 V0 的 x 數據 為 1
SET V000(0) 1
// 將后面的數據賦值給 P0,當插入指令時,自動選取當前關節角度插入
// 插入后修改指令時,也是默認更新數據為當前關節角度
SETJOINT P000 170.2074,-85.7738,102.0724,-104.2114,89.9468,-14.3515,0.0000,0.0000
// 將后面的數據賦值給 P0,當插入指令時,自動選取當前關節角度插入
// 插入后修改指令時,也是默認更新數據為當前笛卡爾角度
SETPOSE V000 -517.8859,-34.5460,208.5253,3.1061,0.0081,1.6502
// 等待 B0 = 0
WAIT B000=0
// 等待 I0 = 0
WAIT I000=0
// 等待 D0 = 0
WAIT D000=0
END
LUA 代碼:
Sleep(1)
-- 從全局變量獲取數據
local b0 = get_global_variable("B0")
local i0 = get_global_variable("I0")
local d0 = get_global_variable("D0")
-- 對于 P,V 變量,由于存儲連續的 6 個數據,可以通過以下幾種方式獲取
local j7 = {}
j7[1],j7[2],j7[3],j7[4],j7[5],j7[6] = get_global_variable("P0")
local pose0 = {}
pose0[1],pose0[2],pose0[3],pose0[4],pose0[5],pose0[6] = get_global_variable("V0")
local j1,j2,j3,j4,j5,j6 = get_global_variable("P0")
local p0 = {j1, j2, j3, j4, j5, j6}
local v0 = {get_global_variable("V0")}
-- 向全局變量賦值數據
-- 設置 B0 為 1
set_global_variable("B0", 1)
-- 設置 D0 為 1
set_global_variable("D0", 1)
-- 設置 I0 為 1
set_global_variable("I0", 1)
-- 設置 P0 的數據為 1,2,3,4,5,6
set_global_variable("P0", 1, 2, 3, 4, 5, 6)
-- 設置 V0 的數據為 1,2,3,4,5,6
set_global_variable("V0", 1, 2, 3, 4, 5,6)
4.1 使用全局變量簡易交互示例
JBI 代碼 :
NOP
// 設置數據
SET D000 0
SET D001 -90
SET D002 0
SET D003 -90
SET D004 90
SET D005 0
// 將 B001 設置為 1,使 lua 進行計算賦值
SET B001 1
// 等待 B001 為 0,等于 0 代表 lua 的計算賦值完成
WAIT B001=0
TIMER T=0.002 S
MOVJ P001 VJ=30% CR=0.0MM ACC=50 DEC=50
END
LUA 代碼:
sleep(1)
elite_print("runing")
-- 等待 jbi 運行
repeat
elite_print("Waiting B1 == 1!")
until
(get_global_variable("B1") == 1)
-- 獲取數據并賦值
local j1 = get_global_variable("D0")
local j2 = get_global_variable("D1")
local j3 = get_global_variable("D2")
local j4 = get_global_variable("D3")
local j5 = get_global_variable("D4")
local j6 = get_global_variable("D5")
set_global_variable("P1", j1, j2, j3, j4, j5, j6)
set_global_variable("B1", 0)
elite_print("done")
4.2運行效果
上述兩個程序同時運行后,LUA 側會一直等 B1=1,當 jbi 初始化 D 變量后,設置 B1 為 1,lua 側開始獲取數據并將其賦值給 P1,隨后設置 B1 為 0,然后 JBI 側檢測到 B1 為 0,即運行到新的 P1
5.1 使用輸入輸出簡易交互示例
JBI代碼:
//前臺設置數字輸出0為1啟動腳本
NOP
DOUT OT#(0) 1
//等待腳本執行完成
WAIT OT#(0)=0
MOVEL V=200MM/S CR=0MM ACC=50 DEC=50 V1
END
lua代碼:
while (true) do
repeat
--等待前臺腳本啟動
o0=get_robot_io_status("o0")
sleep(0.01)
until(o0==1)
sleep(0.02)
client_send_data(ip,"start",0,port)
sleep(0.5)
ret,recv=client_recv_data (ip,1,0,port)
while recv=="" do
sleep(3)
client_send_data(ip,"start",0,port)
sleep(0.5)
ret,recv=client_recv_data (ip,1,0,port)
end
tempString=string.format("%s",recv)
CamData=string.split(tempString,",")
if tonumber(CamData[1])==1 then
set_global_variable("b2",1)
elseif tonumber(CamData[1])==0 then
set_global_variable("b2",0)
end
rz=math.rad(tonumber(CamData[4]))
elite_print("機器人定位數據:","X=",CamData[2],",Y=",CamData[3],",RZ=",rz)
sleep(0.01)
a1,a2,a3,a4,a5,a6=get_global_variable("V1")
sleep(0.02)
set_global_variable ("V1",tonumber(CamData[2]),tonumber(CamData[3]),a3,a4,a5,rz)
set_robot_io_status("o0",0)
--腳本執行完畢反饋給前臺
end


























