











EC機器人簡單碼垛(4點法)
簡介
該文檔適用于艾利特機器人EC/EA系列機械臂,可用于一些機械臂碼垛應用場景。該碼垛程序包使用時只需要設置碼盤的4個對角點的物料位置,以及物料總數,碼盤層數,層高即可,操作簡單,實用易懂。初始程序包是由陳瞭編寫。
1 僅碼垛
僅碼垛的意思就是該程序只支持碼垛,單點取料放入碼盤中
1.1 操作步驟及所需變量
(1)使用前需打開以下變量:
V158 //碼垛上方位
V159 //碼垛位
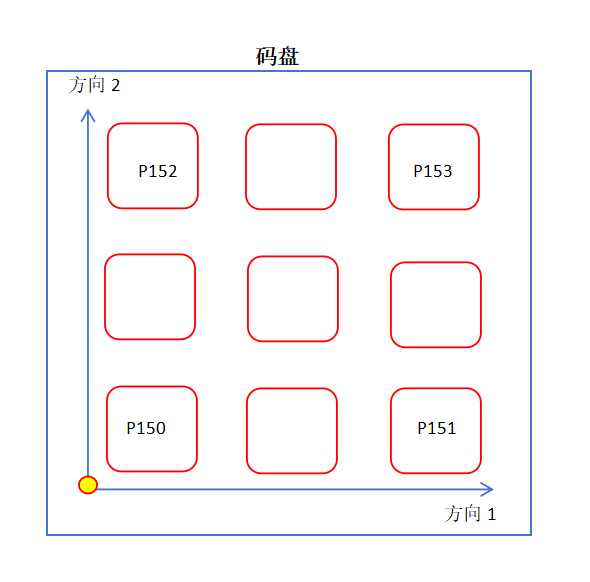
P150 //碼盤第一個點
P151 //碼盤第二個點
P152 //碼盤第三個點
P153 //碼盤第四個點
I 100 //碼垛計數
(2)將JBI主程序和子程序導入到機械臂里面,LUA程序導入機械臂并保存設置。
(3)打開JBI子程序,更新P150-153這4個點位,點位設置示意圖如下:
(4)設置好子程序里面 I150-153 等參數,參數解析如下:
I150 第一個方向個數(行數)
I151 第二個方向個數(列數)
I152 Z方向層數
I153 單層層高,單位mm
(5)在JBI主程序里面,設置固定抓取點,固定抓取點的位置為第17行
(6)將機械臂程序運行模式設置為 “ 連續循環 “ 模式,運行主程序
1.2 JBI程序
● 主程序
該程序是主運行程序(JBI),無需修改
NOP
CALL JOB:test_pallet_setting
//調用子程序
RESTARTLUA INDEX=1
//B000與后臺LUA交互
//1:計算碼垛
//2:計算拆垛
SET B000 0
//I100 當前碼垛個數
SET I100 1
LABEL *startpallet
SET B000 1
TIMER T=0.1 S
WAIT B000 = 0
// 此處需增加固定點抓取程序
// V158為當前計算得到的碼垛點
// v159 上方偏移30mm
SET V159 V158
CCOOD CART
ADD V159(2) 30
//碼垛
MOVL V159 V=1000MM/S CR=10.0MM ACC=50 DEC=50
MOVL V158 V=100MM/S CR=0.0MM ACC=50 DEC=50
TIMER T=0.5 S
MOVL V159 V=1000MM/S CR=0.0MM ACC=50 DEC=50
INC I100
JUMP *startpallet IF I100<I159
END
● 子程序
在該程序里面設置碼盤4個對角點點位,碼垛層數,層高,碼垛總個數(JBI)
NOP
// 以下為碼垛設置部分
// **************
// 150-159用于碼垛
// P150 startpose 第一個點
// P151 rowpose 第一個方向的末端點
// P152 columnpose 第二個方向的末端點
// P153 refpose 遠端點
//P150---------->P152
// | 第二個方向 |
// | |
// | |
//第一個方向 |
// | |
//P151 -------- P153
SETJOINT P150 -13.5978,-104.8072,145.8060,-129.0093,134.8434,-180.1184
SETJOINT P151 -47.0715,-104.5984,133.2336,-88.6142,125.0733,-222.4587
SETJOINT P152 -5.5062,-53.8769,86.6584,-128.8164,134.5548,-168.7319
SETJOINT P153 -23.4796,-55.2147,81.2515,-104.4537,133.6682,-193.8322
// I150 第一個方向個數
// I151 第二個方向個數
// I152 Z方向層數
// I153 單層層高,單位mm
SET I150 3
SET I151 4
SET I152 2
SET I153 50
// **************
// 以上為碼垛設置部分
//以下部分無需設置和修改
JOINTTOPOSE P150 V150
JOINTTOPOSE P151 V151
JOINTTOPOSE P152 V152
JOINTTOPOSE P153 V153
SET I159 I150
MUL I159 I151
MUL I159 I152
INC I159
// I159為碼垛總個數
TPWRITE FinishSetting
END
1.3 Lua程序
該lua腳本在機器人后臺運行即可,無需修改(LUA)
-- 1st pallet direction: startpos--->rowpos
-- 2nd pallet direction: startpos--->columnpos
-- 3rd pallet direction: startpos--->Z direction
-- startpos(1) ------ columnpos(2)
-- |
-- |
-- |
-- rowpos(3) refpos(4)
-- count: current pallet number global variable :I100
-- count_row: total row number global variable :I150
-- count_column: total column nubmer global variable :I151
-- count_layer: total layer nubmer global variable :I152
-- height: single layer height global variable :I153
-- startpos global variable :V150
-- rowpos global variable :V151
-- columnpos global variable :V152
-- refpos global variable :V153
-- outpos : calculation result global variable :V160
function Interpolate_pose(p_from, p_to, alpha)
-- Linear interpolation of tool position
-- When alpha is 0, returns p_from. When alpha is 1, returns p_to. As alpha goes from 0 to 1, returns a
-- pose going in a straight line from p_from to p_to.
-- If alpha is less than 0, returns a point before p_from on the line.
-- If alpha is greater than 1, returns a pose after p_to on the line.
local p = {}
p[1] = p_from[1] + (p_to[1] - p_from[1]) * alpha
p[2] = p_from[2] + (p_to[2] - p_from[2]) * alpha
p[3] = p_from[3] + (p_to[3] - p_from[3]) * alpha
p[4] = p_from[4]
p[5] = p_from[5]
p[6] = p_from[6]
return p
end
function WaitUntil(var, value)
--local vtmp =
while get_global_variable(var) ~= value do
sleep(0.05)
end
end
--set_global_variable("B0", 0)
function
PalletCal(j_count,j_row,j_column,j_height,j_startpos,j_rowpos,j_columnpos,j_refpos)
local count = get_global_variable(j_count)
local count_row = get_global_variable(j_row)
local count_column = get_global_variable(j_column)
local layer_height = get_global_variable(j_height)
local startpos = {get_global_variable(j_startpos)}
local rowpos = {get_global_variable(j_rowpos)}
local columnpos = {get_global_variable(j_columnpos)}
local refpos = {get_global_variable(j_refpos)}
local current_layer = math.floor((count - 1) / (count_row*count_column))
count = math.fmod(count-1, (count_row*count_column)) +1 --獲取在當前層第幾個
local current_row = math.fmod(count - 1, count_row) -- 取余數 get residual
local current_column = math.floor((count - 1) / count_row) -- 取整數 get integer+1
if(count_row==1) then
count_row =2
end
if(count_column==1) then
count_column =2
end
local outpos1 = Interpolate_pose(startpos, rowpos, current_row / (count_row - 1))
local outpos2 = Interpolate_pose(columnpos, refpos, current_row / (count_row - 1))
local outpos3 = Interpolate_pose(outpos1, outpos2, current_column / (count_column - 1))
outpos3[3] = outpos3[3] + layer_height * current_layer
return outpos3
end
while true do
local state = get_global_variable('B0')
if state ==1 then
-- 碼垛
local outpos3 =PalletCal("I100","I150","I151","I153","V150","V151","V152","V153")
set_global_variable('V158',outpos3[1],outpos3[2],outpos3[3],outpos3[4],outpos3[5],outpos3[6])
state = 0
set_global_variable("B0", 0)
elseif state == 2 then
-- 拆垛
local outpos3 =PalletCal("I101","I160","I161","I163","V160","V161","V162","V163")
set_global_variable('V168',outpos3[1],outpos3[2],outpos3[3],outpos3[4],outpos3[5],outpos3[6])
state = 0
set_global_variable("B0", 0)
end
sleep(0.01)
end
2 拆垛與碼垛
拆垛與碼垛程序包的意思就是取料垛盤依次取料,依次放入碼垛盤中。
2.1 操作步驟及所需變量
(1)使用前需在示教器上打開以下變量:
V158 //碼垛上方位
V159 //碼垛放料位
V168 //拆垛上方位
V169 //拆垛取料位
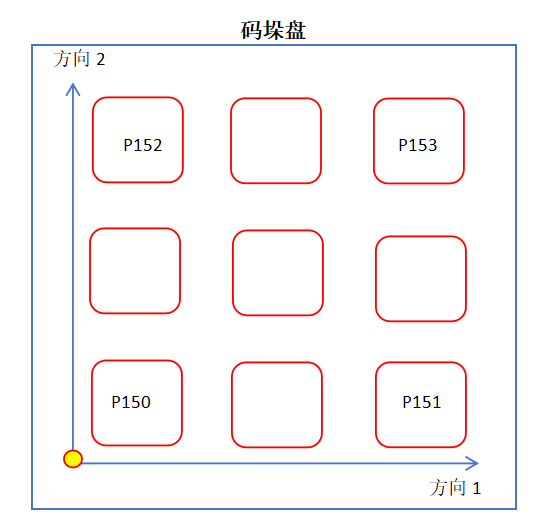
P150 //碼垛盤第一個點
P151 //碼垛盤第二個點
P152 //碼垛盤第三個點
P153 //碼垛盤第四個點
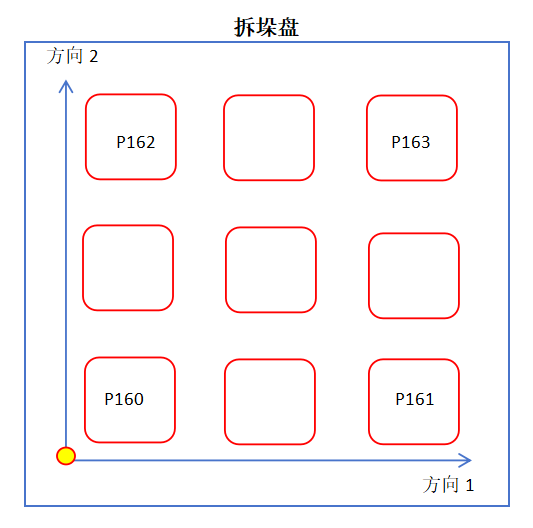
P160 //拆垛盤第一個點
P161 //拆垛盤第二個點
P162 //拆垛盤第三個點
P163 //拆垛盤第四個點
I 100 //碼垛計數
I 101 //拆垛計數
(2)將JBI主程序和子程序導入到機械臂控制柜里面,LUA程序導入機械臂并保存設置。
(3)打開JBI子程序更新P150-153,P160-163這8個點位,點位設置示意圖如下。以及設置好I150-153,I160-I163等參數,參數解析如下:
(4)設置好I150-153等參數,參數解析如下:
● 碼垛參數:
I150 第一個方向個數
I151 第二個方向個數
I152 Z方向層數
I153 單層層高,單位mm
● 拆垛參數:
I160 第一個方向個數
I161 第二個方向個數
I162 Z方向層數
I163 單層層高,單位mm
(5)將機械臂程序運行模式設置為 “ 連續循環 “ 模式,運行主程序
2.2 JBI程序
該程序是主運行程序,無需修改
NOP
CALL JOB:test_pallet_setting
//調用下面的子程序
RESTARTLUA INDEX=1
//B000與后臺LUA交互
//1:計算碼垛
//2:計算拆垛
SET B000 0
//I100 當前碼垛個數
SET I100 1
//I101 當前拆垛個數
SET I101 1
LABEL *startpallet
SET B000 1
TIMER T=0.1 S
WAIT B000 = 0
SET B000 2
TIMER T=0.1 S
WAIT B000 = 0
// V168為當前計算得到的拆垛點
// v169 上方點
SET V169 V168
CCOOD CART
ADD V169(2) 30
// V158為當前計算得到的碼垛點
// v159 上方點
SET V159 V158
CCOOD CART
ADD V159(2) 30
//拆垛
MOVL V169 V=1000MM/S CR=10.0MM ACC=50 DEC=50
MOVL V168 V=100MM/S CR=0.0MM ACC=50 DEC=50
TIMER T=0.5 S
MOVL V169 V=1000MM/S CR=0.0MM ACC=50 DEC=50
INC I101
//碼垛
MOVL V159 V=1000MM/S CR=10.0MM ACC=50 DEC=50
MOVL V158 V=100MM/S CR=0.0MM ACC=50 DEC=50
TIMER T=0.5 S
MOVL V159 V=1000MM/S CR=0.0MM ACC=50 DEC=50
INC I100
JUMP *startpallet IF I100<i159< div="">
END
● 子程序
在該程序里面設置碼盤4個對角點點位,碼垛層數,層高,碼垛總個數(JBI)
NOP
// 以下為碼垛設置部分
// **************
// 150-159用于碼垛
// P150 startpose 第一個點
// P151 rowpose 第一個方向的末端點
// P152 columnpose 第二個方向的末端點
// P153 refpose 遠端點
//P150---------->P152
// | 第二個方向 |
// | |
// | |
//第一個方向 |
// | |
//P151 -------- P153
SETJOINT P150 -13.5978,-104.8072,145.8060,-129.0093,134.8434,-180.1184
SETJOINT P151 -47.0715,-104.5984,133.2336,-88.6142,125.0733,-222.4587
SETJOINT P152 -5.5062,-53.8769,86.6584,-128.8164,134.5548,-168.7319
SETJOINT P153 -23.4796,-55.2147,81.2515,-104.4537,133.6682,-193.8322
// I150 第一個方向個數
// I151 第二個方向個數
// I152 Z方向層數
// I153 單層層高,單位mm
SET I150 3
SET I151 4
SET I152 2
SET I153 50
// **************
// 以上為碼垛設置部分
// 以下為拆垛設置部分
// **************
// 160-169用于拆垛
SETJOINT P160 -46.5353,-94.3171,101.4025,-67.3931,125.3434,-221.8873
SETJOINT P161 -56.9397,-80.2992,84.8697,-59.2620,119.7353,-232.2963
SETJOINT P162 -30.5356,-59.9489,63.1652,-75.3110,131.8696,-203.1308
SETJOINT P163 -40.2939,-46.5040,38.5012,-56.4464,128.2411,-214.9811
// I160 第一個方向個數
// I161 第二個方向個數
// I162 Z方向層數
// I163 單層層高,單位mm
SET I160 3
SET I161 4
SET I162 2
SET I163 -50
// 以上為拆垛設置部分
//以下部分無需設置和修改
// **************
JOINTTOPOSE P150 V150
JOINTTOPOSE P151 V151
JOINTTOPOSE P152 V152
JOINTTOPOSE P153 V153
JOINTTOPOSE P160 V160
JOINTTOPOSE P161 V161
JOINTTOPOSE P162 V162
JOINTTOPOSE P163 V163
SET I159 I150
MUL I159 I151
MUL I159 I152
INC I159
// I159為碼垛總個數
SET I169 I160
MUL I169 I161
MUL I169 I162
INC I169
// I169為拆垛總個數
TPWRITE FinishSetting
END
2.3 Lua程序
該lua腳本在機器人后臺運行即可,無需修改
-- 1st pallet direction: startpos--->rowpos
-- 2nd pallet direction: startpos--->columnpos
-- 3rd pallet direction: startpos--->Z direction
-- startpos(1) ------ columnpos(2)
-- |
-- |
-- |
-- rowpos(3) refpos(4)
-- count: current pallet number global variable :I100
-- count_row: total row number global variable :I150
-- count_column: total column nubmer global variable :I151
-- count_layer: total layer nubmer global variable :I152
-- height: single layer height global variable :I153
-- startpos global variable :V150
-- rowpos global variable :V151
-- columnpos global variable :V152
-- refpos global variable :V153
-- outpos : calculation result global variable :V160
function Interpolate_pose(p_from, p_to, alpha)
-- Linear interpolation of tool position
-- When alpha is 0, returns p_from. When alpha is 1, returns p_to. As alpha goes from 0 to 1, returns a
-- pose going in a straight line from p_from to p_to.
-- If alpha is less than 0, returns a point before p_from on the line.
-- If alpha is greater than 1, returns a pose after p_to on the line.
local p = {}
p[1] = p_from[1] + (p_to[1] - p_from[1]) * alpha
p[2] = p_from[2] + (p_to[2] - p_from[2]) * alpha
p[3] = p_from[3] + (p_to[3] - p_from[3]) * alpha
p[4] = p_from[4]
p[5] = p_from[5]
p[6] = p_from[6]
return p
end
function WaitUntil(var, value)
--local vtmp =
while get_global_variable(var) ~= value do
sleep(0.05)
end
end
--set_global_variable("B0", 0)
function
PalletCal(j_count,j_row,j_column,j_height,j_startpos,j_rowpos,j_columnpos,j_refpos)
local count = get_global_variable(j_count)
local count_row = get_global_variable(j_row)
local count_column = get_global_variable(j_column)
local layer_height = get_global_variable(j_height)
local startpos = {get_global_variable(j_startpos)}
local rowpos = {get_global_variable(j_rowpos)}
local columnpos = {get_global_variable(j_columnpos)}
local refpos = {get_global_variable(j_refpos)}
local current_layer = math.floor((count - 1) / (count_row*count_column))
count = math.fmod(count-1, (count_row*count_column)) +1 --獲取在當前層第幾個
local current_row = math.fmod(count - 1, count_row) -- 取余數 get residual
local current_column = math.floor((count - 1) / count_row) -- 取整數 get integer+1
if(count_row==1) then
count_row =2
end
if(count_column==1) then
count_column =2
end
local outpos1 = Interpolate_pose(startpos, rowpos, current_row / (count_row - 1))
local outpos2 = Interpolate_pose(columnpos, refpos, current_row / (count_row - 1))
local outpos3 = Interpolate_pose(outpos1, outpos2, current_column / (count_column - 1))
outpos3[3] = outpos3[3] + layer_height * current_layer
return outpos3
end
while true do
local state = get_global_variable('B0')
if state ==1 then
-- 碼垛
local outpos3 =PalletCal("I100","I150","I151","I153","V150","V151","V152","V153")
set_global_variable('V158',outpos3[1],outpos3[2],outpos3[3],outpos3[4],outpos3[5],outpos3[6])
state = 0
set_global_variable("B0", 0)
elseif state == 2 then
-- 拆垛
local outpos3 =PalletCal("I101","I160","I161","I163","V160","V161","V162","V163")
set_global_variable('V168',outpos3[1],outpos3[2],outpos3[3],outpos3[4],outpos3[5],outpos3[6])
state = 0
set_global_variable("B0", 0)
end
sleep(0.01)
end
附件
1. 僅碼垛
(1)簡易說明
reademe.md
(2)LUA腳本程序
pallet_maduo.lua
(3)JBI程序
主程序:
test_pallet_only_maduo.jbi
子程序:
test_pallet_setting_only_maduo.jbi
2. 碼垛與拆垛
(1)簡易說明
reademe.md
(2)LUA腳本程序
pallet_calculation2.lua
(3)JBI程序
主程序
test_pallet.jbi
子程序
test_pallet_setting2.jbi


























