











CS機器人socket通訊程序中以樹狀圖形式編寫
1. 簡介
socket通信協(xié)議,一種標(biāo)準(zhǔn)的通信協(xié)議,同時是目前工業(yè)電子設(shè)備之間常用的通訊協(xié)議,市面上機器人與夾持器,視覺,上位機等通訊大多采用這種通訊方式。以下介紹機器人socket通訊基本的幾個指令腳本,傳輸字符串?dāng)?shù)據(jù)和解析字符串?dāng)?shù)據(jù)。
機器人可以作為socket客戶端,與外部設(shè)備通訊,相關(guān)指令可以參見CS機器人腳本手冊。
2. 操作流程
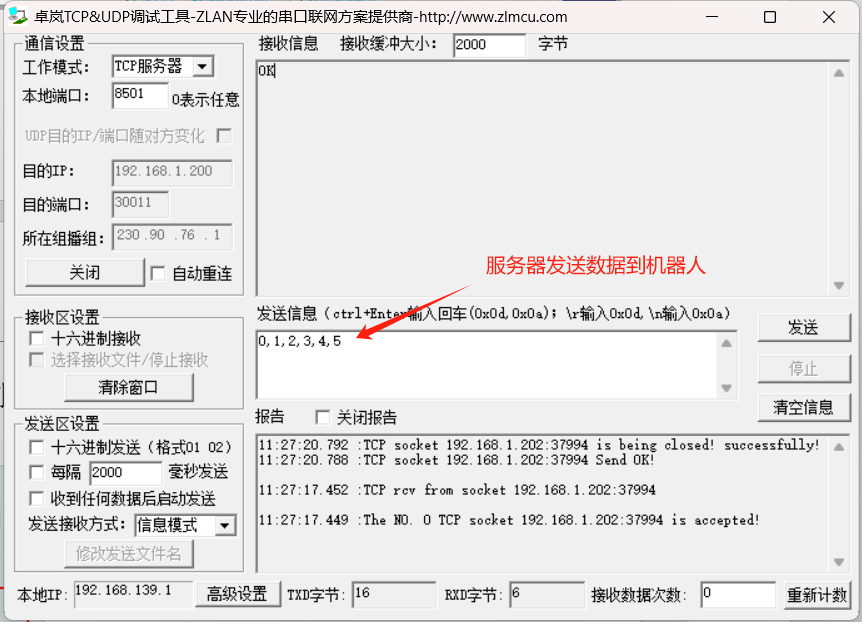
可先建立好通訊的連接,再根據(jù)制定好的字符去發(fā)送和接收,再處理對應(yīng)的字符數(shù)據(jù)轉(zhuǎn)化為可直接使用的數(shù)據(jù)。
2.0 機器人連接網(wǎng)線
將網(wǎng)線連接至控制柜的FB2網(wǎng)口

設(shè)置機器人網(wǎng)口IP
1. 點擊右上角艾利特logo

2. 點擊設(shè)置

3. 選擇靜態(tài)地址,設(shè)置FB2網(wǎng)口的IP

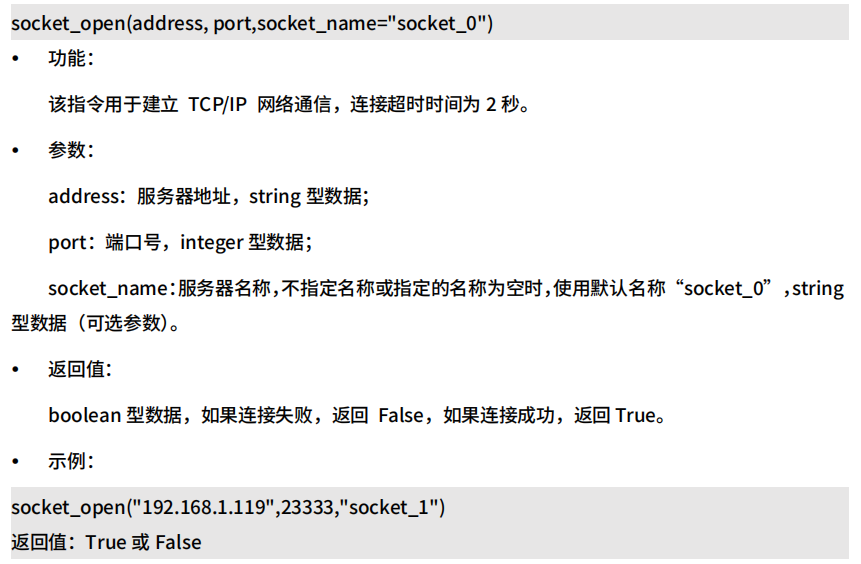
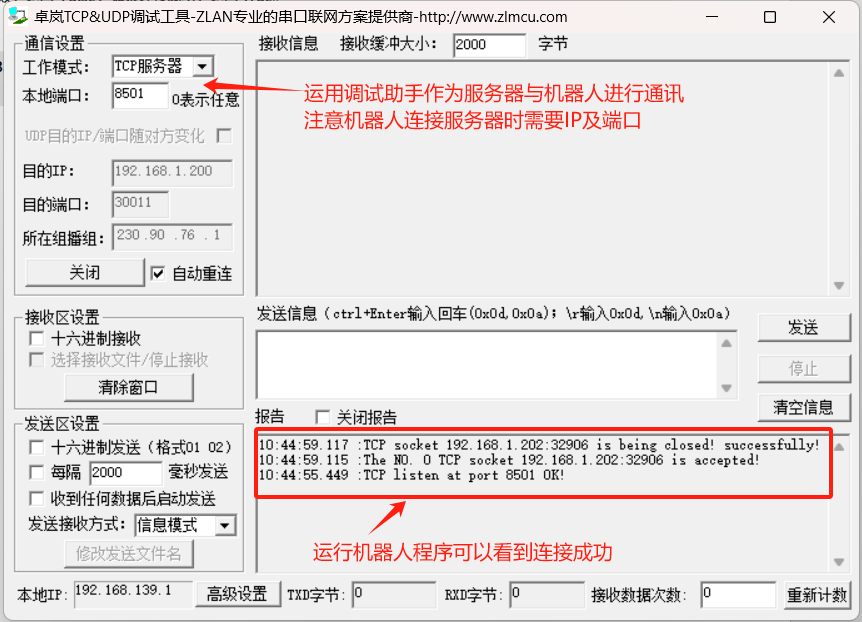
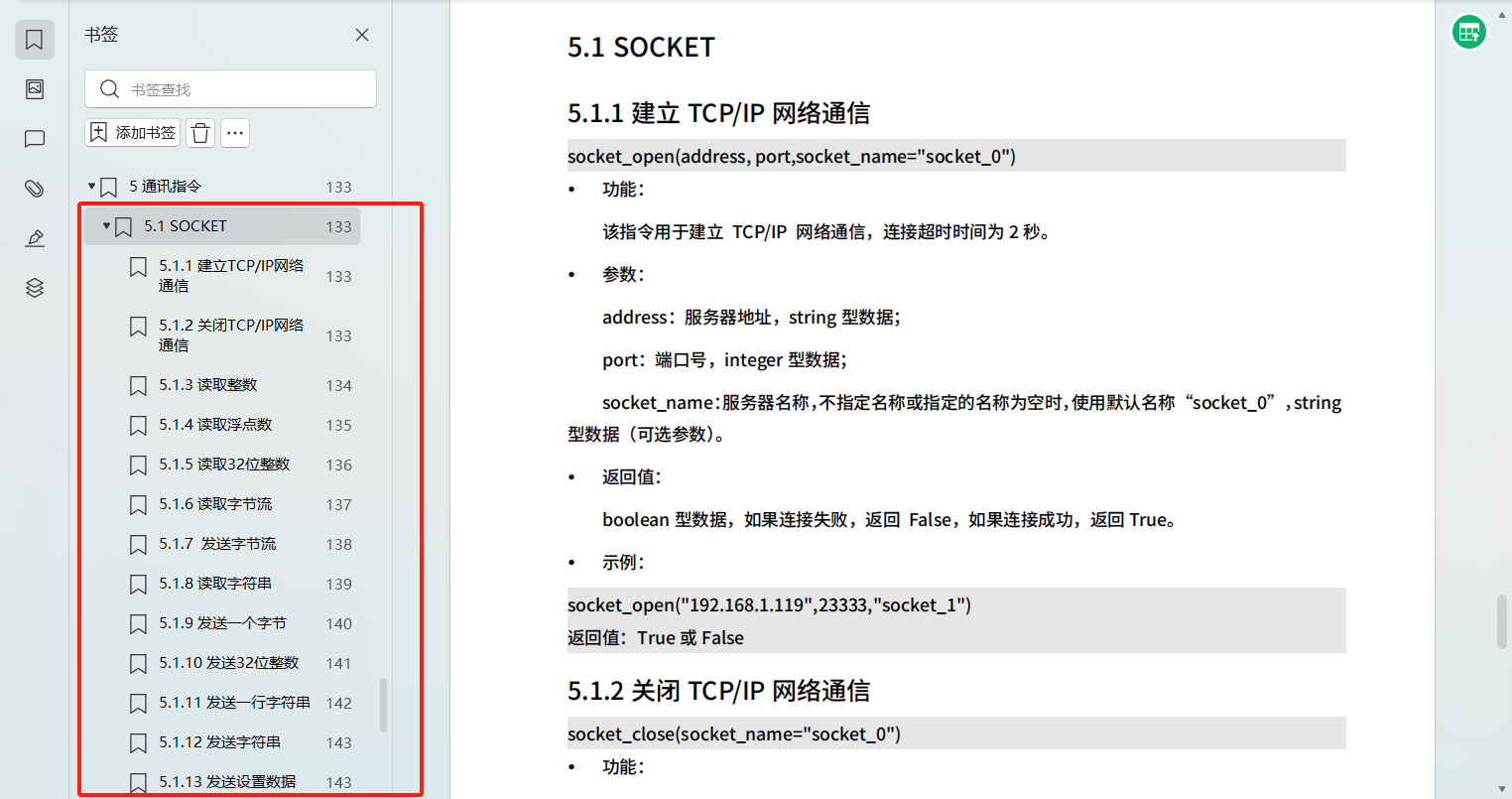
2.1 建立 TCP/IP 網(wǎng)絡(luò)通信指令解析


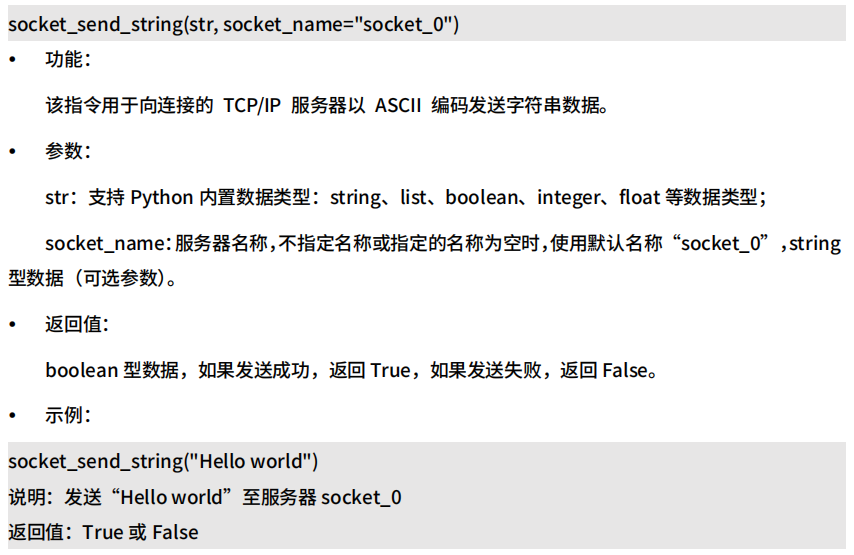
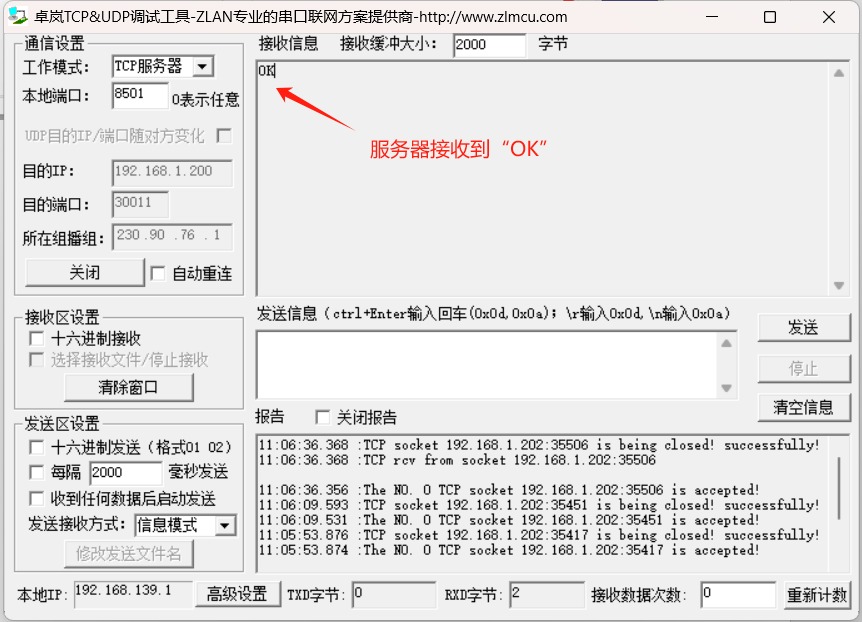
2.2 發(fā)送字符串指令
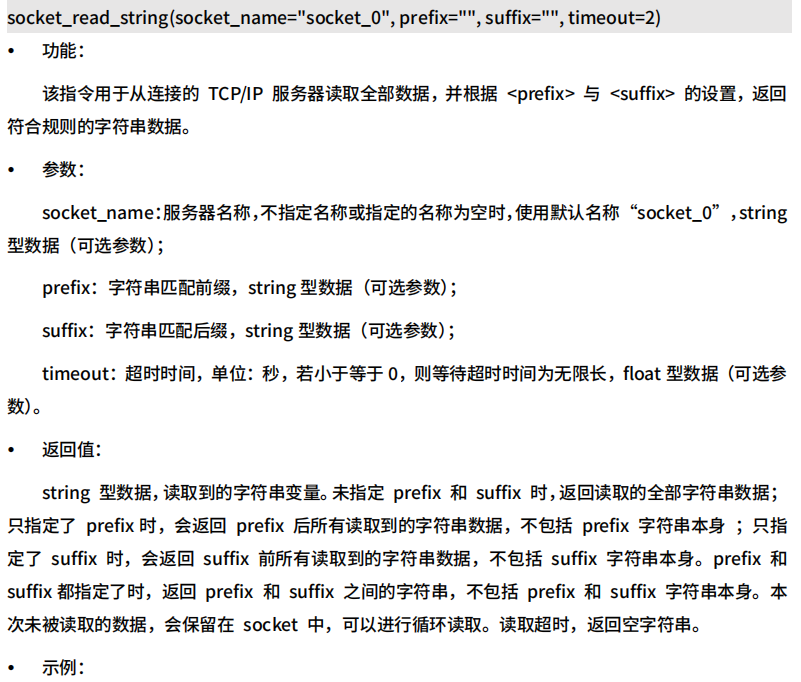
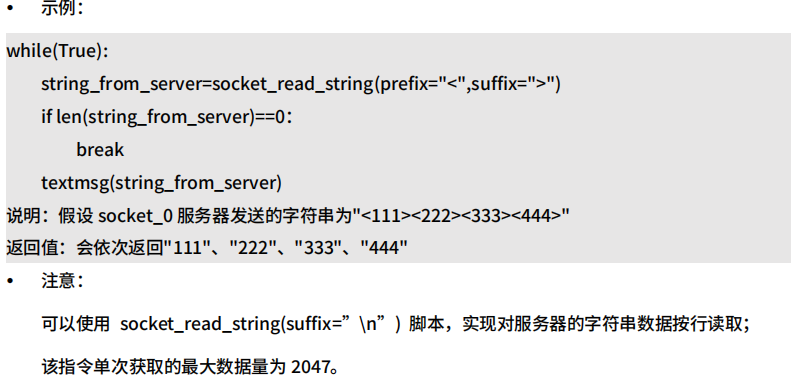
2.3 讀取字符串指令解析
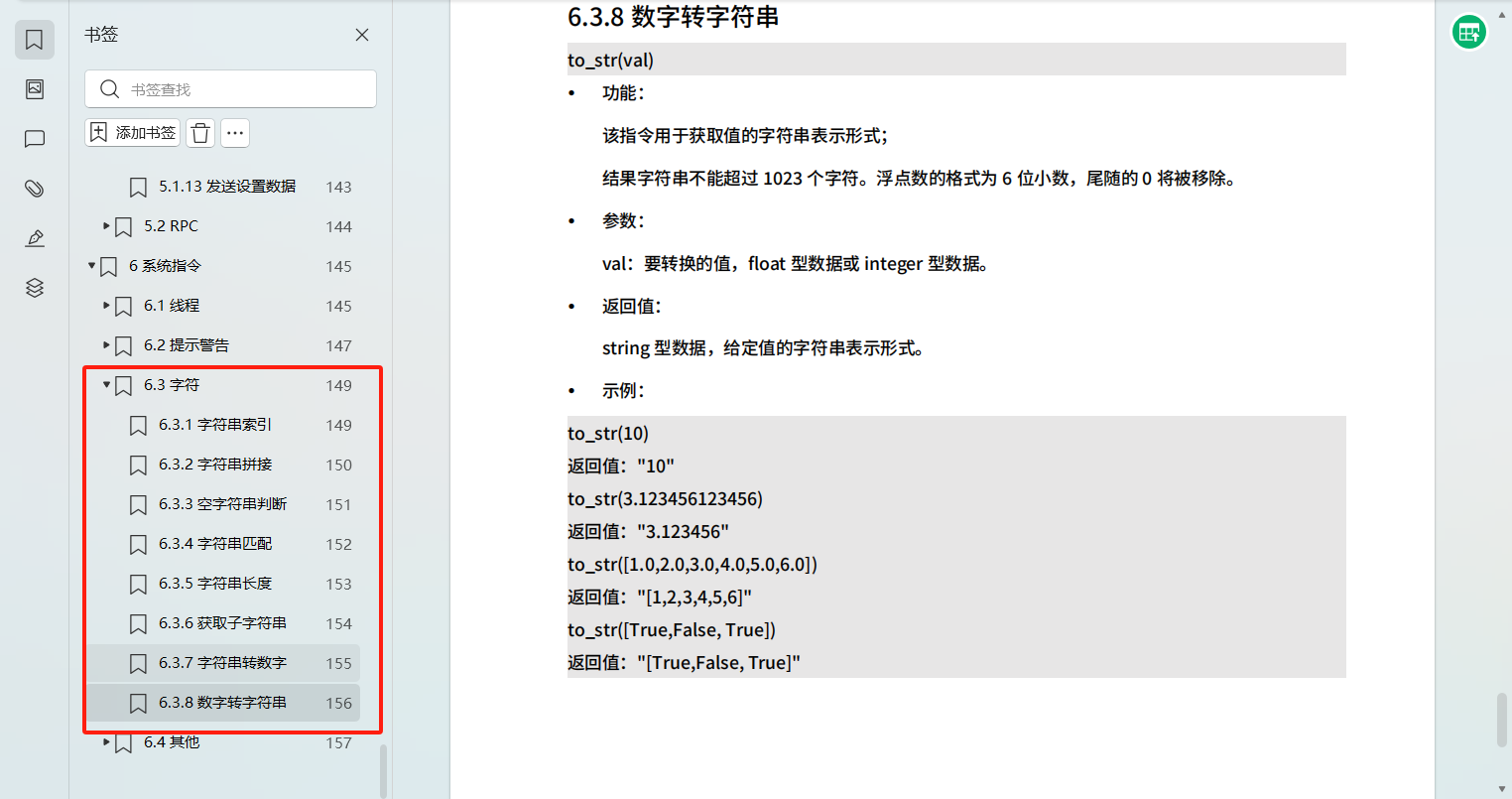
2.4 字符處理
3. 常見問題解答
除了示例中字符指令外,腳本手冊中還其他各項指令可查看腳本手冊了解詳細,因為系統(tǒng)腳本是基于python開發(fā),有關(guān)于python標(biāo)準(zhǔn)庫里面的處理函數(shù)字符均可使用。
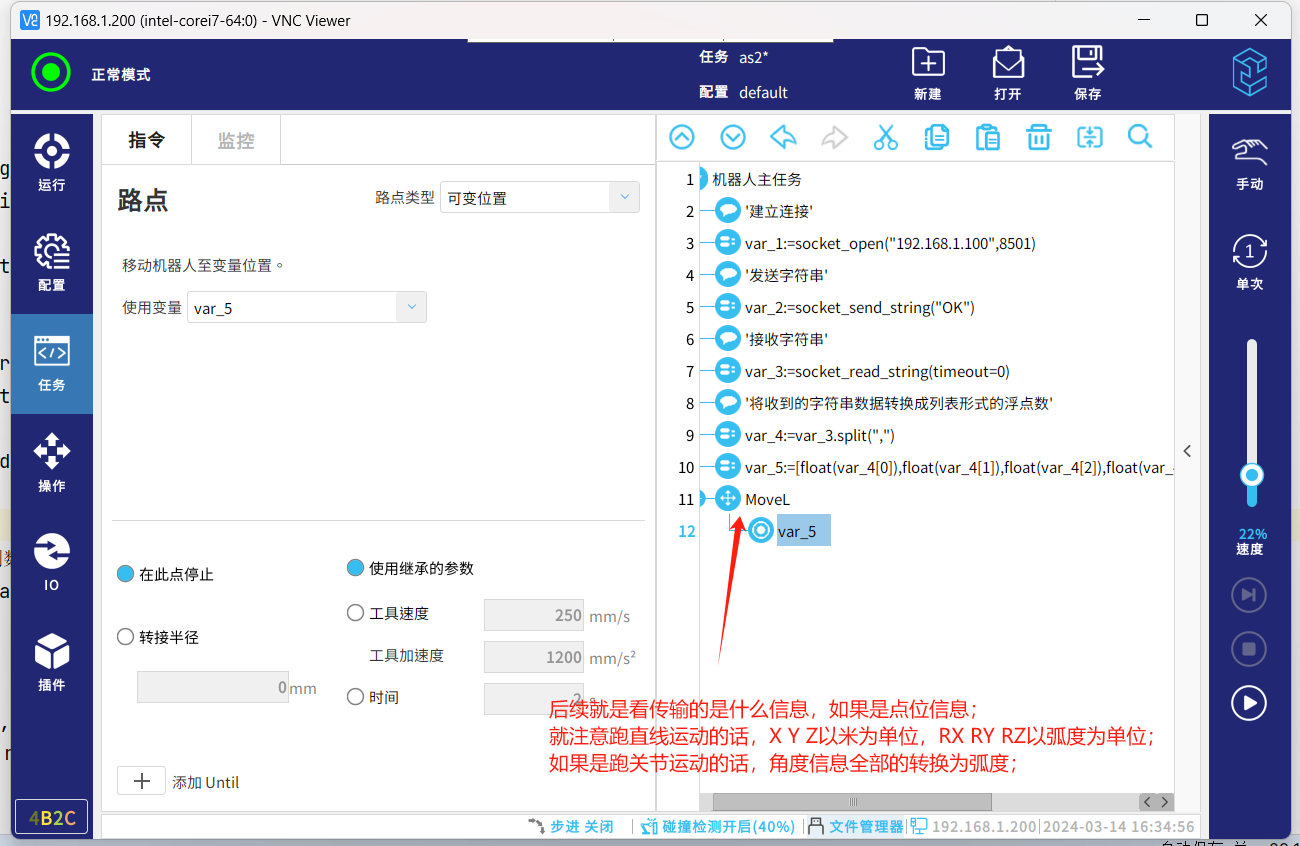
4. 示例
# 建立連接
var_1:=socket_open("192.168.1.100",8501)
# 發(fā)送字符串
var_2:=socket_send_string("OK")
# 接收字符串
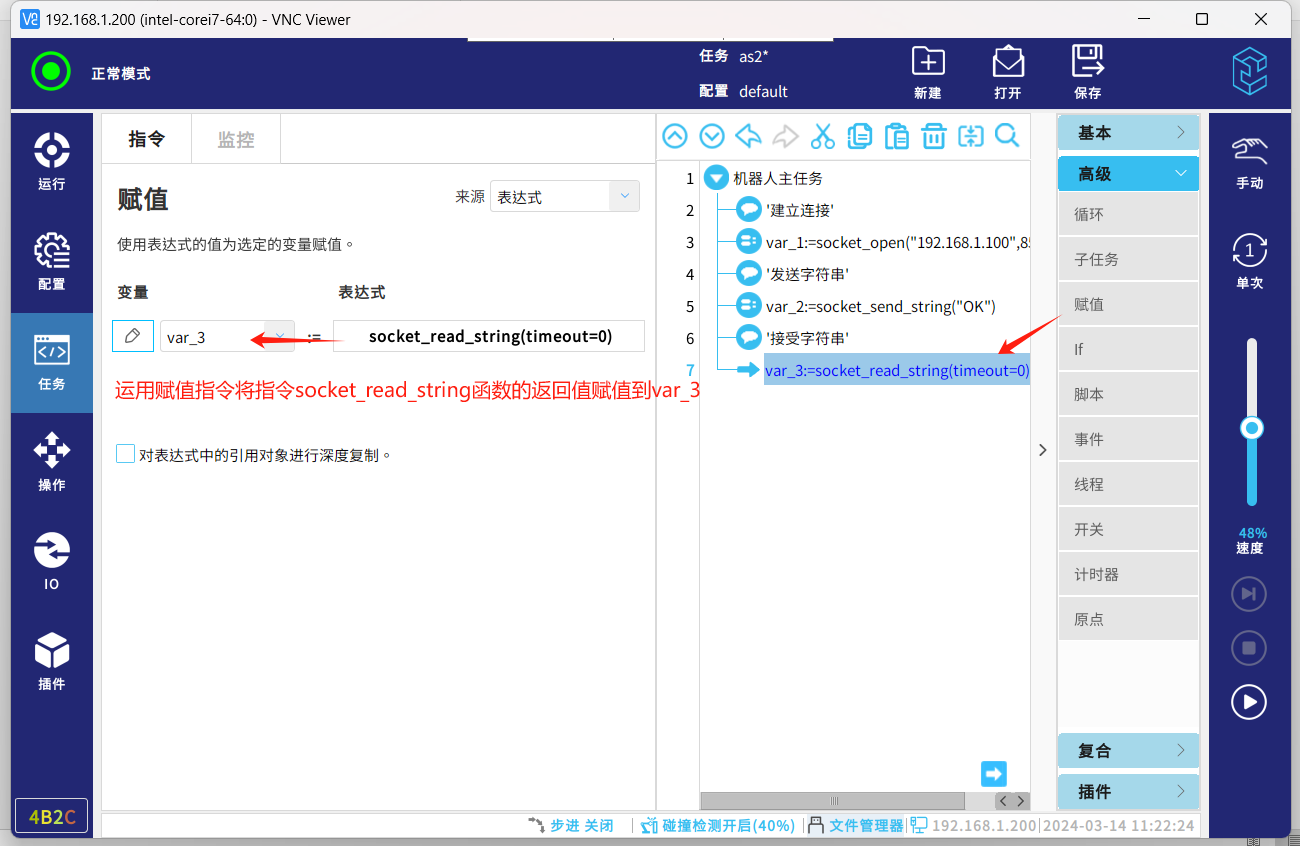
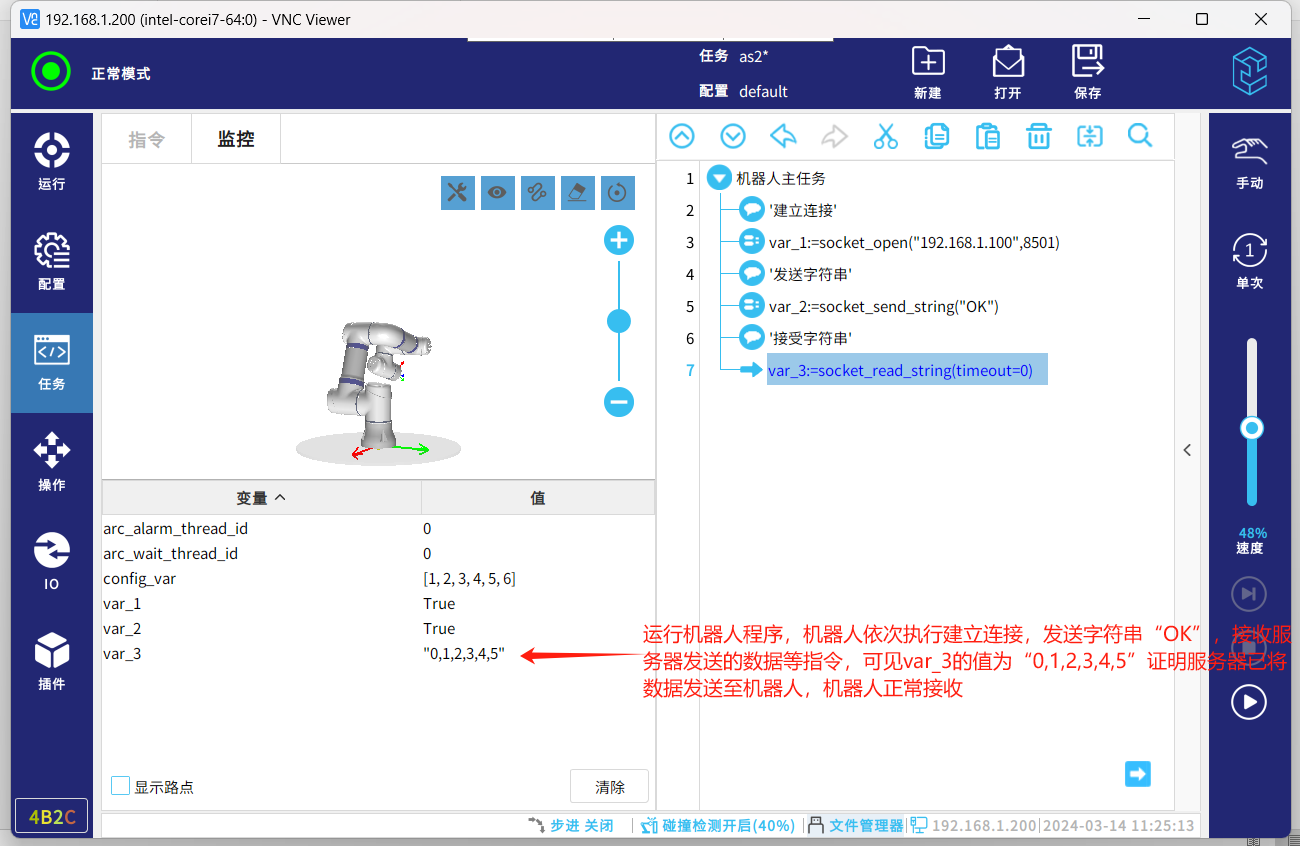
var_3:=socket_read_string(timeout=0)
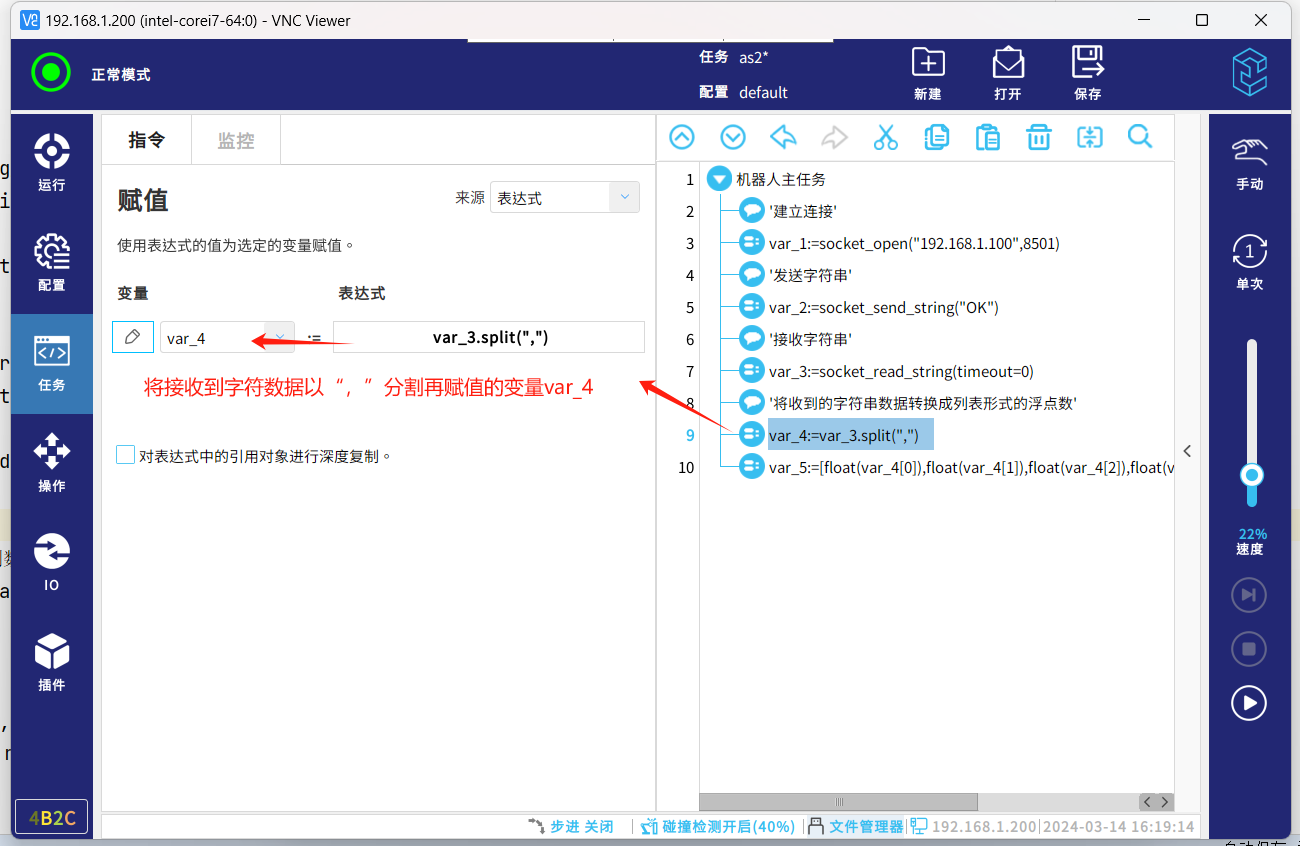
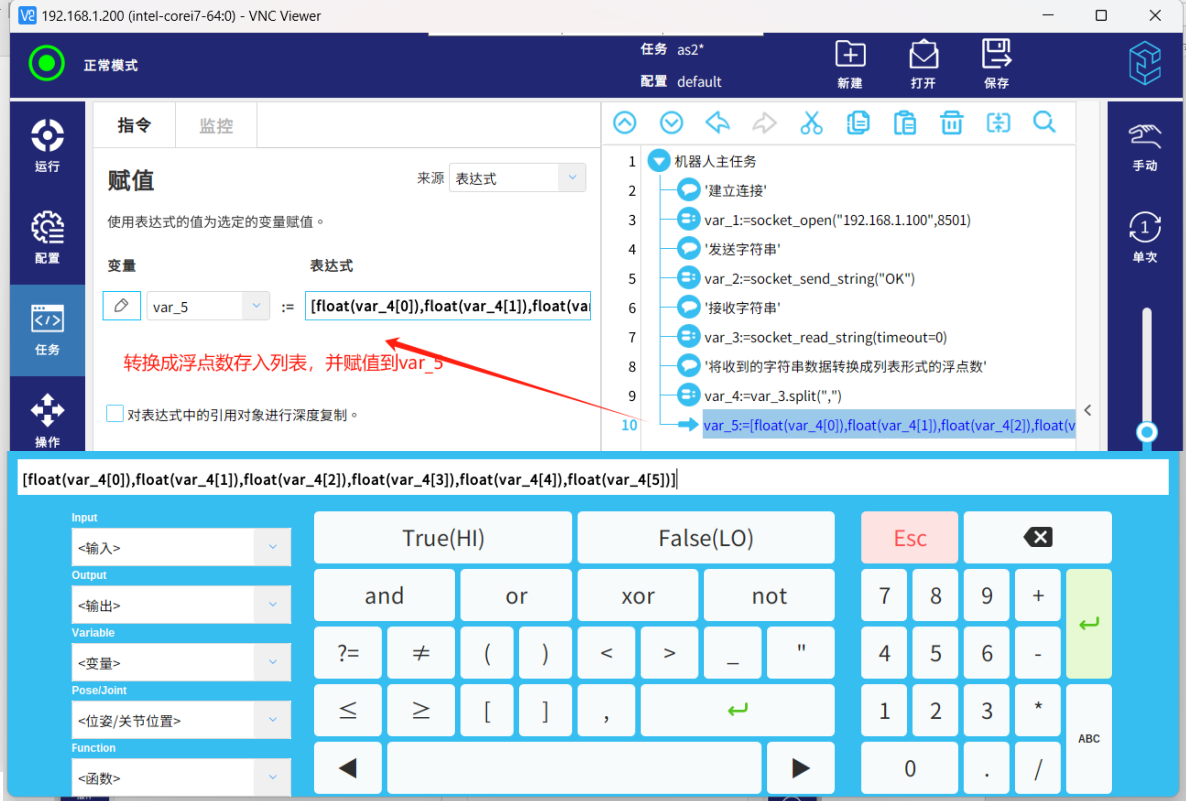
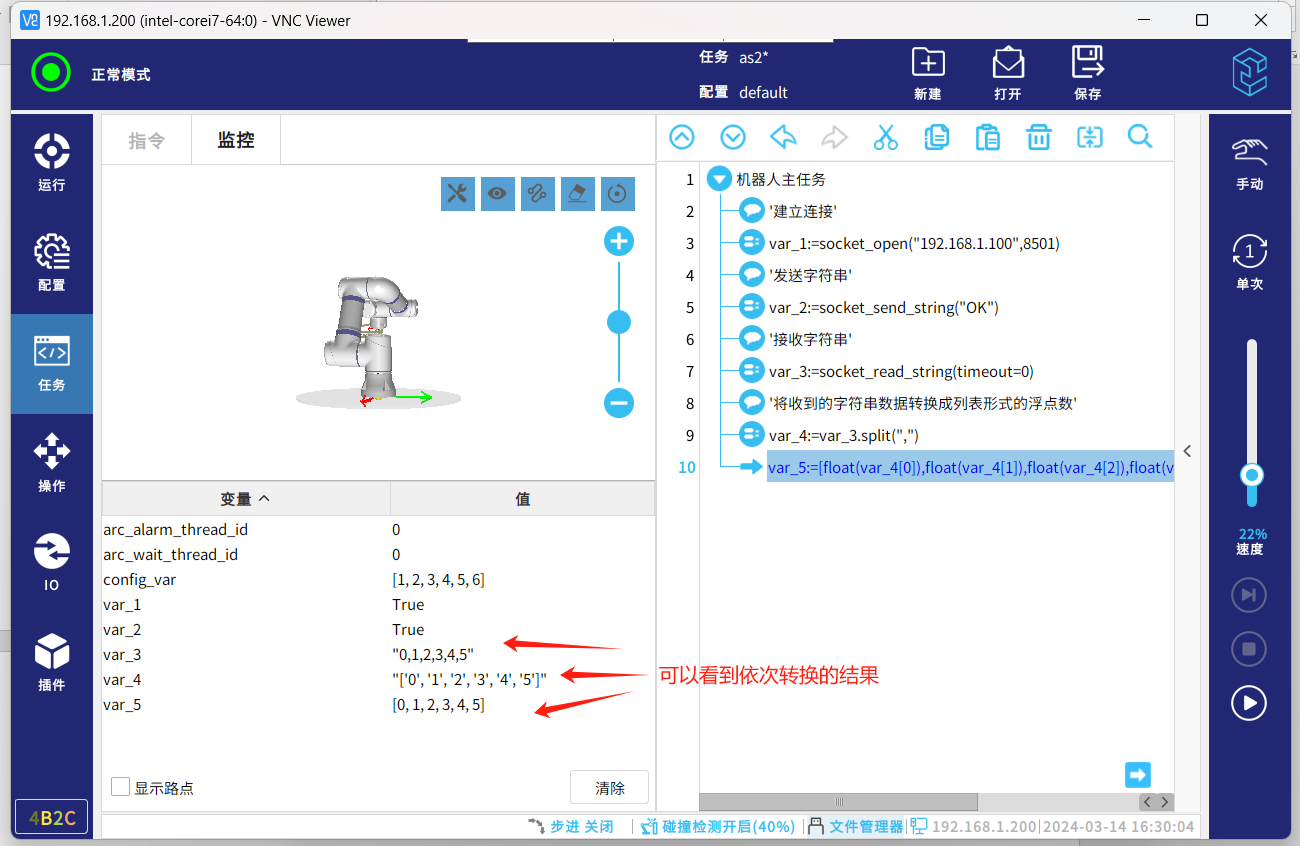
# 將收到的字符串?dāng)?shù)據(jù)轉(zhuǎn)換成列表形式的浮點數(shù)
var_4:=var_3.split(",")
var_5:=[float(var_4[0]),float(var_4[1]),float(var_4[2]),float(var_4[3]),float(var_4[4]),float(var_4[5])]
#如果數(shù)據(jù)是點位數(shù)據(jù)的單位是MM和°可視情況轉(zhuǎn)換為m和rad。


























