











CS機器人控制柜接口介紹
1. 簡介
本文主要介紹CS控制柜內部電氣接口。
2. 操作流程
2.1機器人本體線纜接口和電源接口
機器人電纜必須插入控制柜底部的連接器中,在開啟機器人本體時,務必適當鎖定連接器(ERB1C2K0和ERB1C4K0接口不一致);斷開機器人電纜時必須切斷機器人的電源。
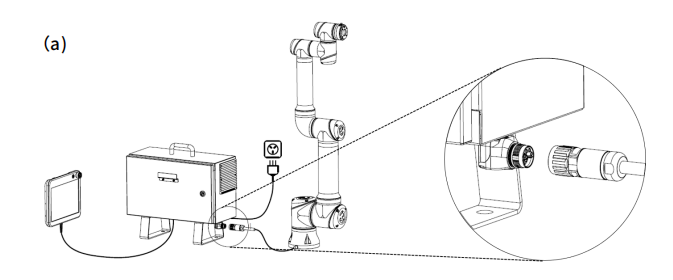
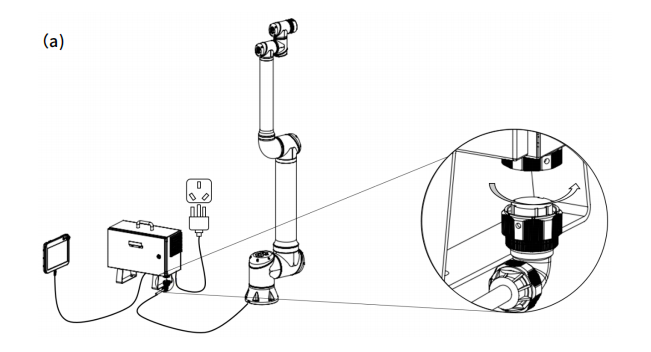
1、ERB1C2K0型控制柜

將插頭插入到控制柜底部的接頭里,注意插入方向,如圖 a 所示;插緊后將插頭上的鎖緊環順時針旋轉 90°以鎖定連接處,如圖 b 所示;最后轉動整個連接器,實現進一步鎖定,如圖 c 所示。
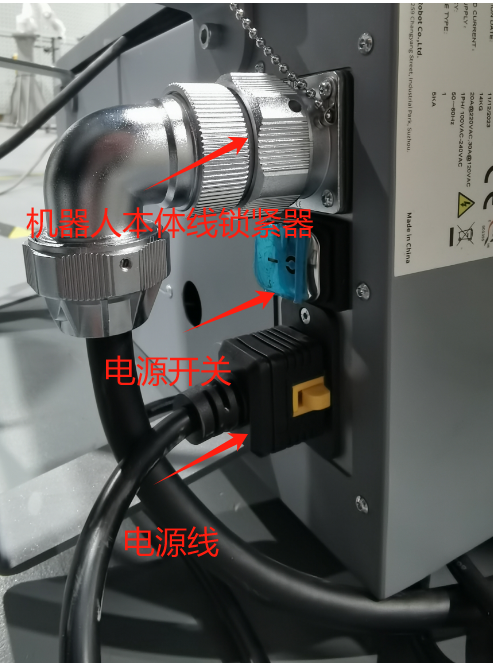
實物圖為先把本體性接口鎖緊器調整為open;將連接器插到底后再順時針旋轉鎖緊器擰到底。

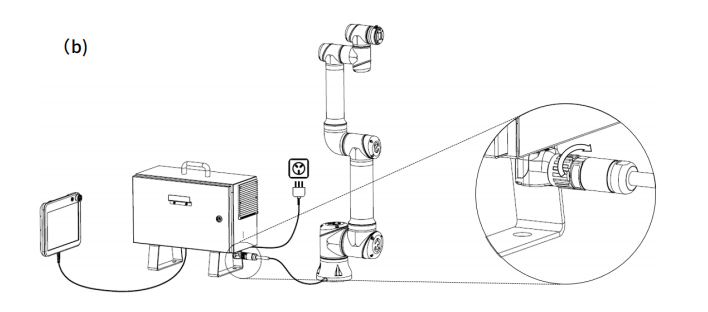
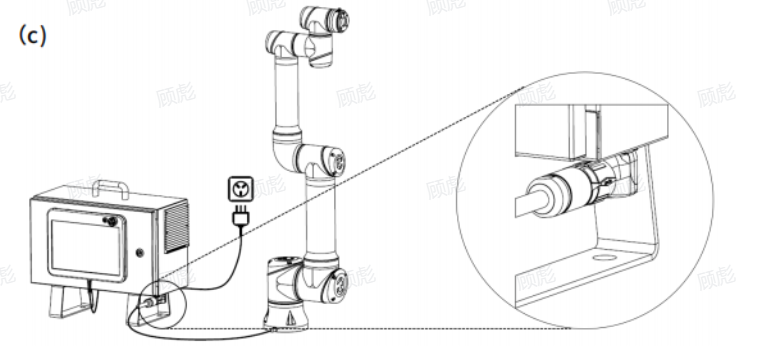
2、ERB1C4K0型控制柜
機器人本體電纜末端有一個插頭,將插頭插入到控制柜底部的接頭里,注意插入方向,如圖 a所示;然后轉動整個連接器,實現進一步鎖定,如圖 b所示。
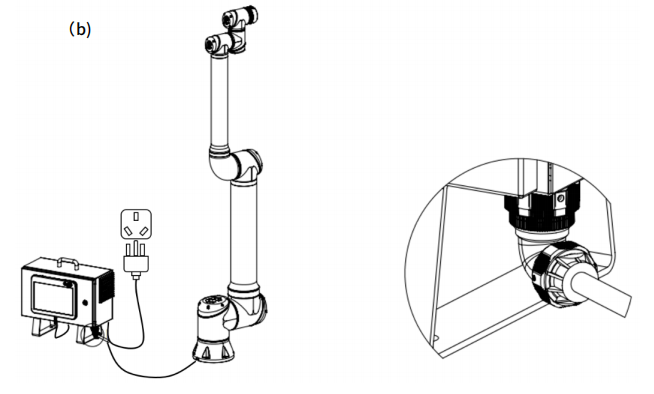
實物圖為將本體現連接線對準控制柜母頭插到底;然后逆時針旋轉鎖緊器,直到定位銷從鎖緊器的銷孔彈出。(鎖緊器到位后會有嗑噔一聲)



2.2內部電氣接口圖
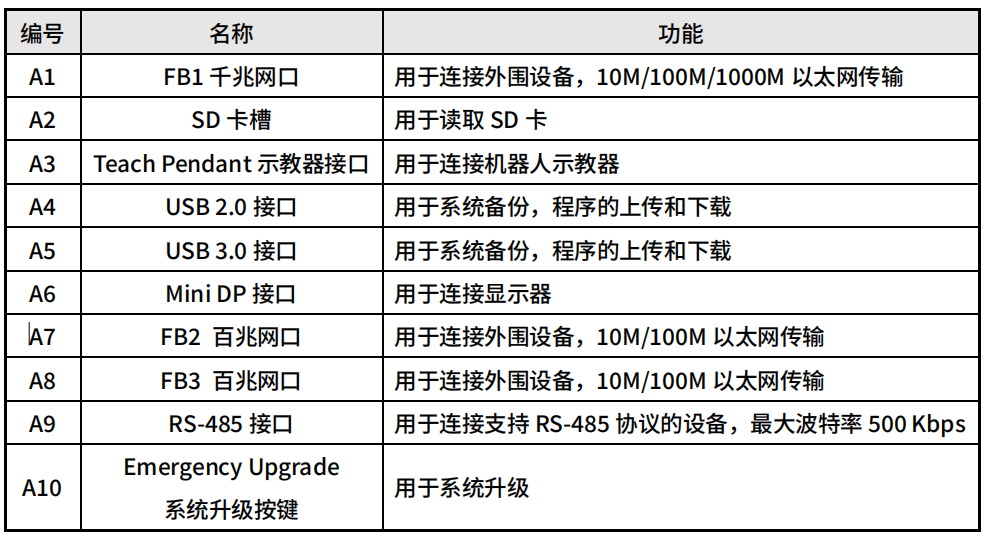
A區:網口*3、SD卡槽、示教器、RS-485、USB、Mini PD。
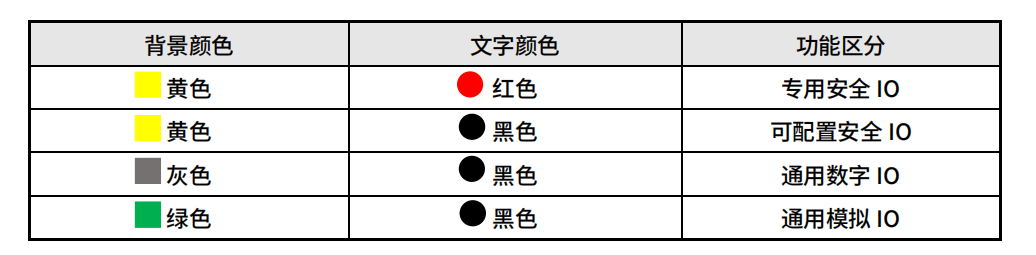
B區:B1 安全IO、B2 遠程開關機、B3 IO電源、B4 高速數字輸入、B5 可配置IO、B6 數字IO(PNP)、B7 模擬IO。

A區電氣接口定義
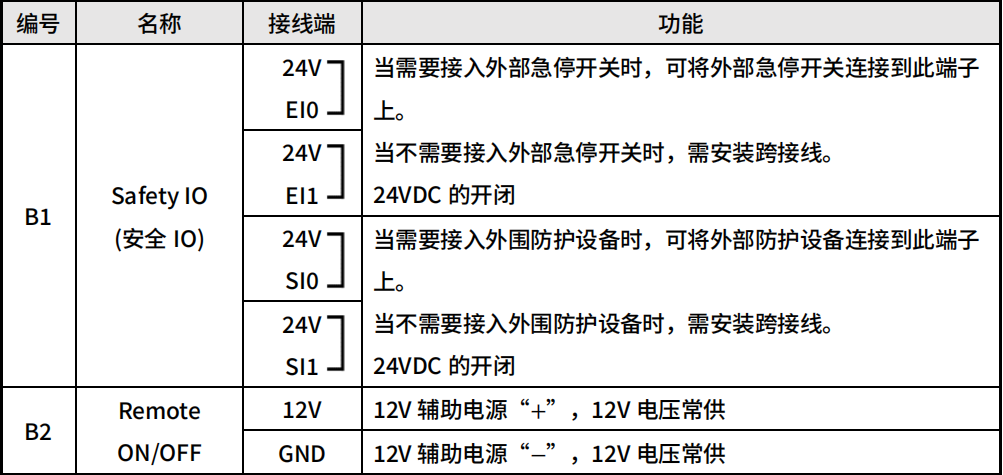
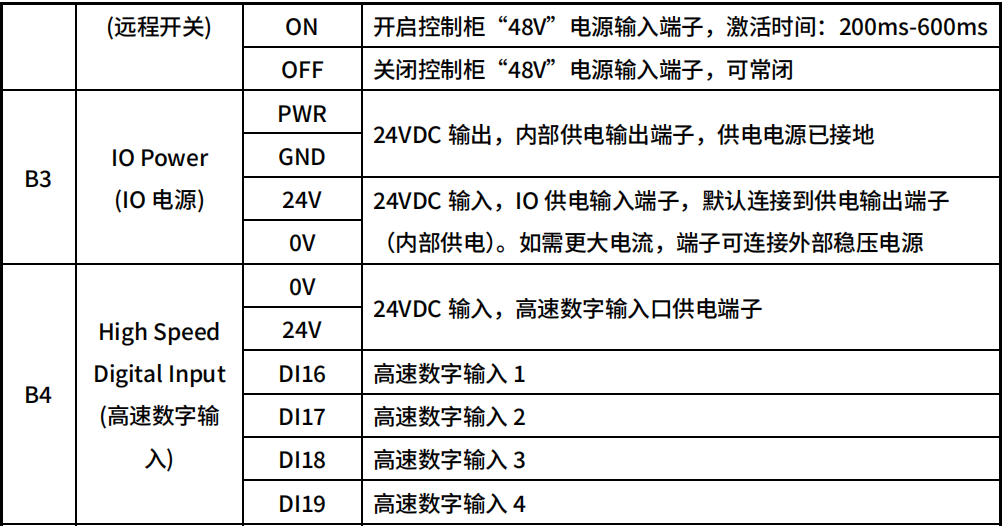
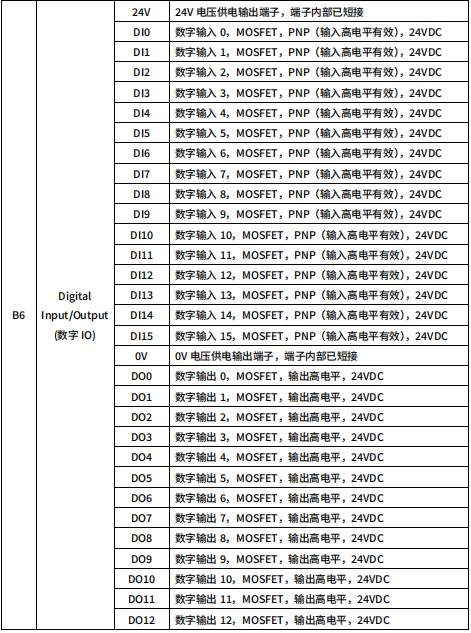
B區接口定義



3. 常見問題解答
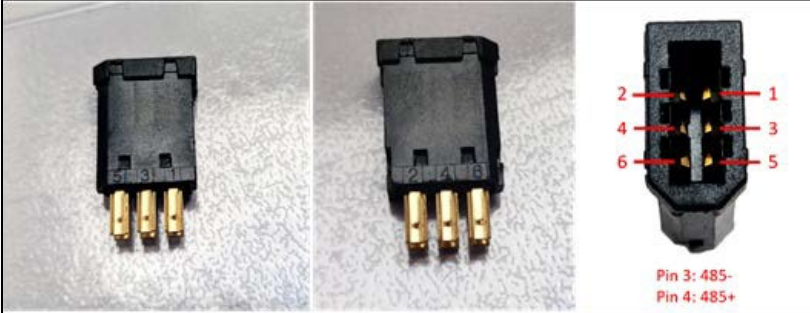
3.1 RS485通訊連接器觸電定義
黑色塑料裝置的正反面分別標有 PIN“1 3 5”和“2 4 6“,PIN3 應焊接到 RS485B,PIN4 應焊接到 RS485A。該接口支持的最大波特率為 500Kbps。(艾利特采購料號:[NA20200039] 連接器)
3.2如何連接外部急停
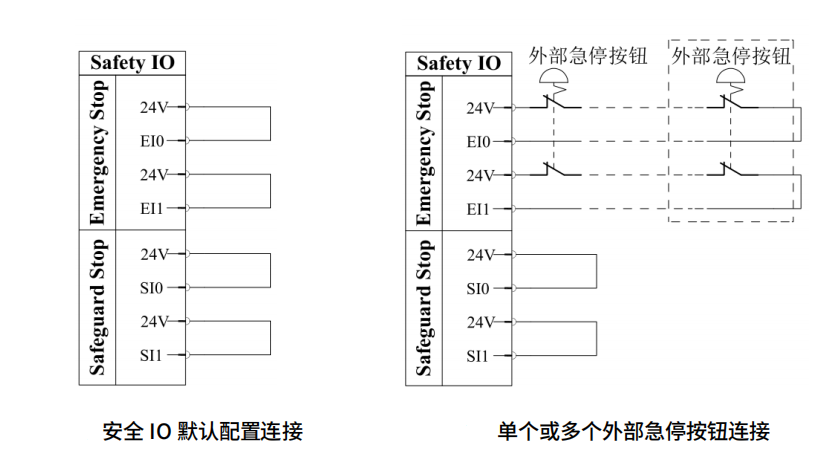
當需要連接一個或多個外部急停按鈕時,所有急停按鈕可串接使用。
在連接急停時應遵循雙回路規則;確保一路故障的情況下另一路能實現急停功能。
如果急停接單回路拍下急停機器人會報警,必須關閉電源重新打開才可恢復正常(安全違規報警)
3.3網口FB1、FB2和FB3有什么區別
FB1網口:profinet通訊,EthernetIP通訊,VNC,二次開發端口,機器人作為modbus/TCP從站。
FB2網口:機器人運行腳本執行相關socket指令,機器人作為modbus/TCP 主站讀寫外部 modbus 從站數據,機器人作為modbus/TCP從站。
FB3網口:研發留位。
附:在CS機器人2.10版本前,profinet采用FB2網口。


























