











CS機器人末端IO接線和控制柜485接線
1. 簡介
本文主要介紹了CS機器人末端IO引腳的定義和控制柜485接線引腳定義和電氣規格。
2. 操作流程
2.1末端接口圖
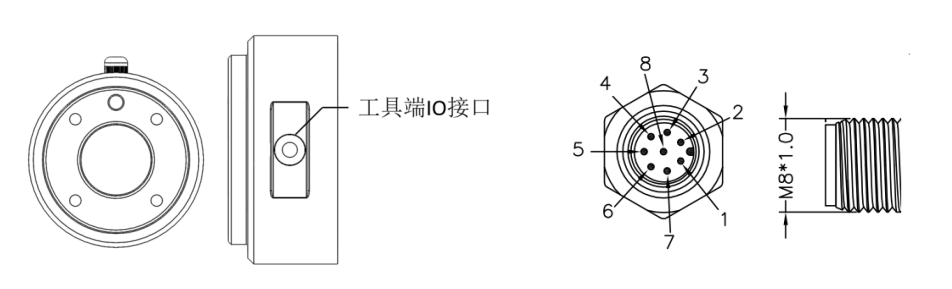
在機器人末端的工具法蘭旁邊有一個圓柱形金屬旋鈕,取下旋鈕可看到 8 針連接器,該連接器可通過IO,模擬量,485等通訊方式為連接到機器人末端 IO 的夾持器、傳感器等設備提供電源和控制信號。
2.2用戶航插焊線和IO定義
用戶航插焊線
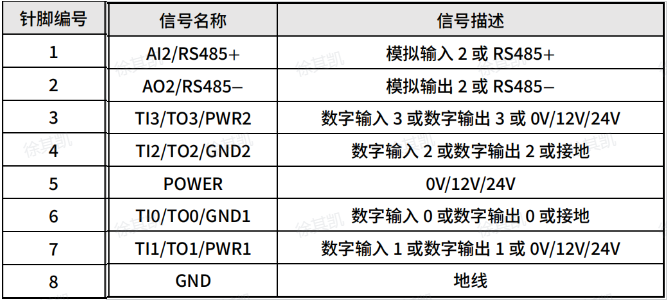
末端IO定義
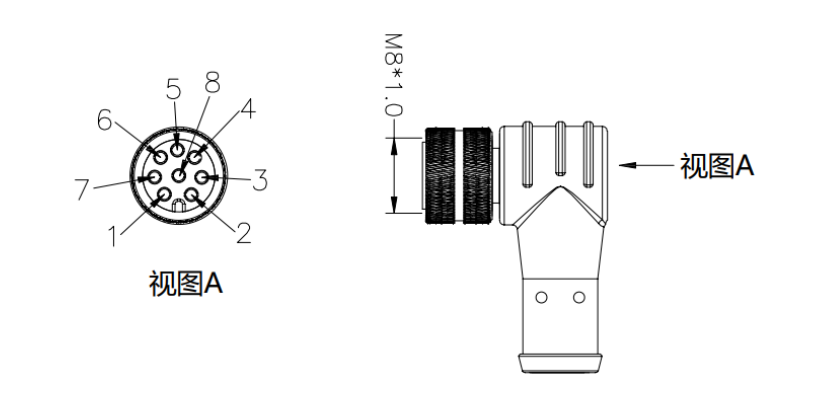
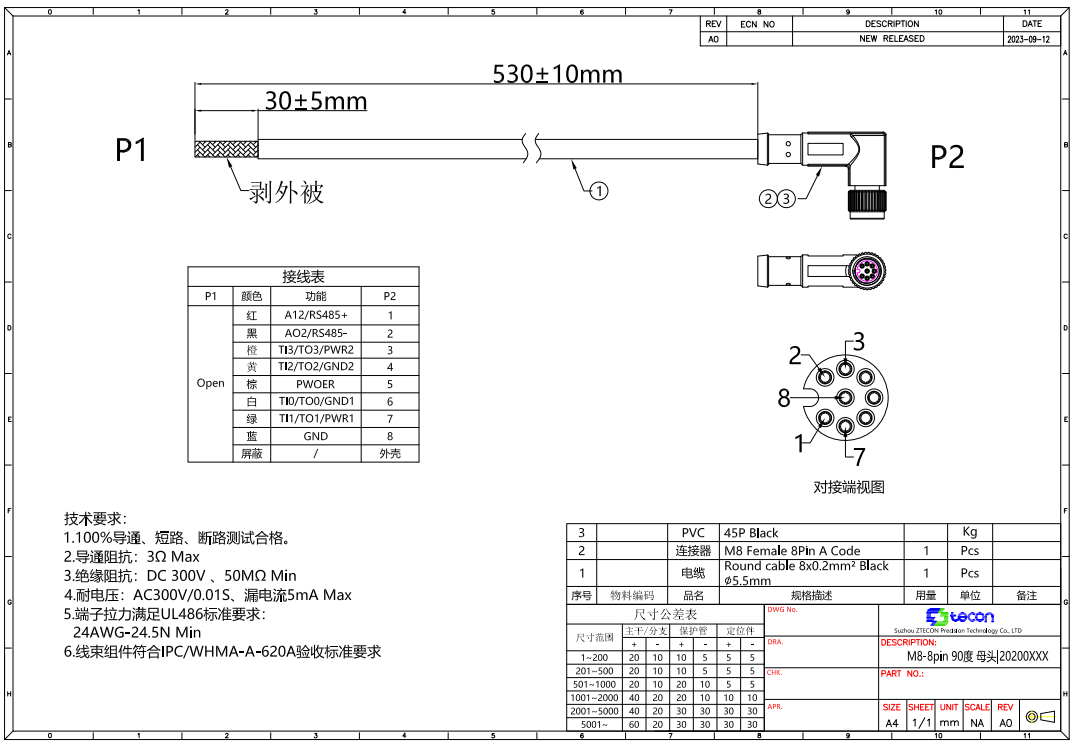
如果是用艾利特提供的8芯彎頭成型線,【物料號NA20300180】如圖;則針腳編號、線序顏色為固定排序。

2.3工具電源
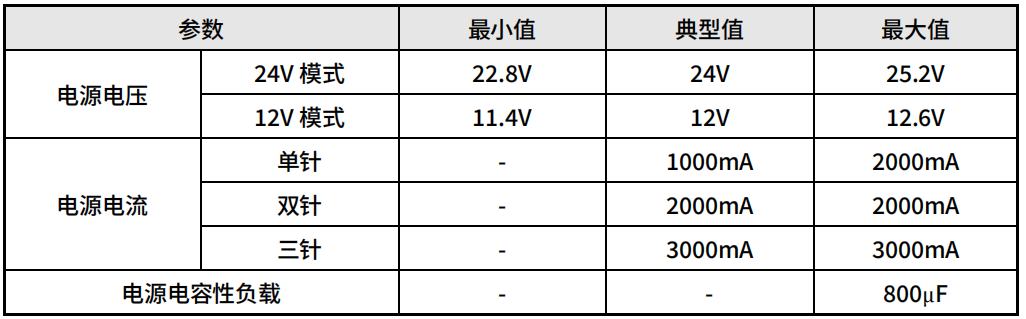
工具 IO 可向外部工具提供 0V、12V 或 24V 的電源,可在示教器的用戶界面 IO 選項卡中對其進行設置,設置不同電壓時其電氣規格如表。
配置-通用-工具Io選項卡界面

2.3.1單針電源模式
在電流大小滿足需求的條件下,可選用單針電源模式,避免占用其余 IO 接口,增加可控制的外部元器件數量。
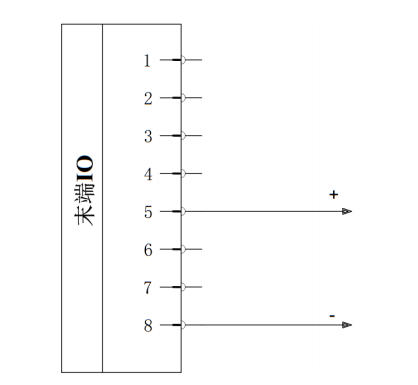
接線方法
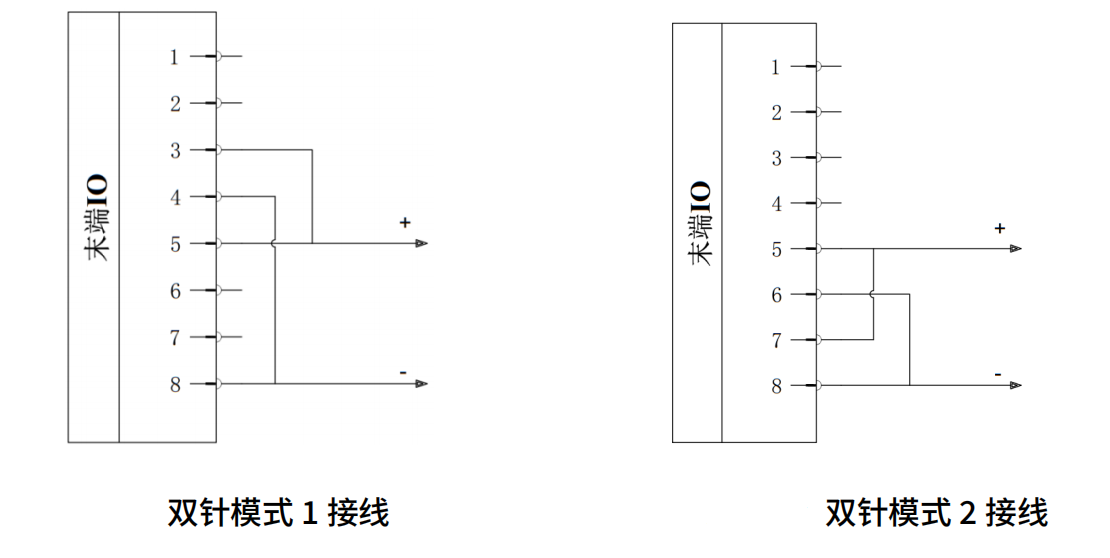
2.3.2雙針電源模式
系統配置:選擇“配置 > 通用 > 工具 IO”,選擇“雙針模式 1”。
接線方法:如下圖雙針模式1接線,將電源線(5)與TI3/TO3/PWR2線(3)連接,接地線(8)與 TI2/TO2/GND2線(4)連接。
系統配置:選擇“配置 > 通用 > 工具 IO”,選擇“雙針模式 2”。
接線方法:如下圖雙針模式2接線,將電源線(5 )與TI1/TO1/PWR1線(7)連接,接地線(8)與TI0/TO0/GND1線(6)連接。
警告:
1、當使用電感性負載時,建議使用續流二極管。
2、雙針電源模式下最大電流是2000mA,最大持續時間1 秒,且最大占空比是10%。平均電流不得超過 1000mA。
2.3.3三針電源模式
系統配置:選擇“配置 > 通用 > 工具 IO”,選擇“三針模式”,三位使能模式下。
接線方法:將電源線(5 )與 TI1/TO1/PWR1 線(7 )和 TI3/TO3/PWR2線(3 )連接;
接地線(8 )與 TI0/TO0/GND1 線(6 )和 TI2/TO2/GND2 線(4 )連接。
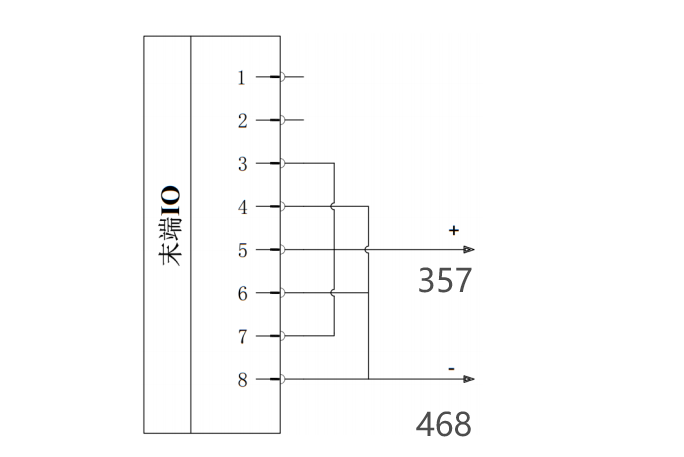
注:多針模式設置會占用一到兩組數字IO。
2.4工具數字輸出
數字輸出支持三種不同模式

2.4.1NPN模式
輸出接口為 NPN 型輸出,支持 1000mA 電流流入。接線方式如圖NPN 模式(單針電源模式)所示。

2.4.2PNP 模式
輸出接口為 PNP 型輸出,支持 1000mA 電流流出。接線方式如圖PNP 模式(單針電源模式)所示。
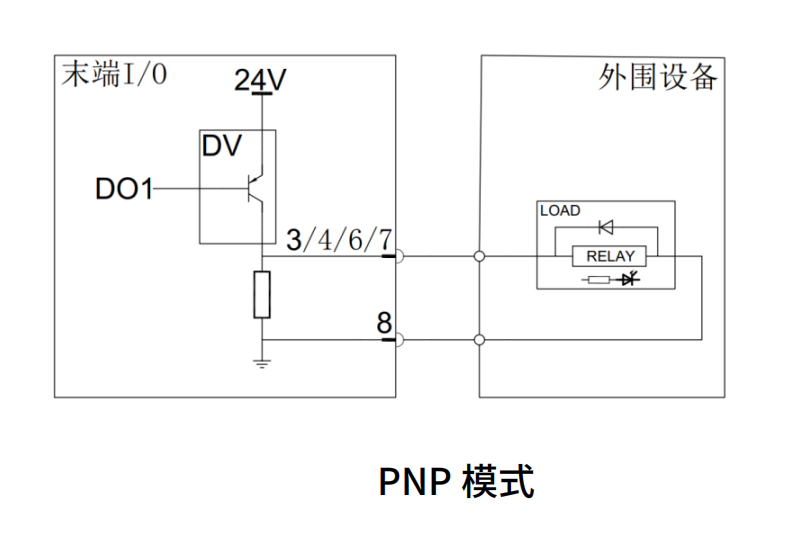
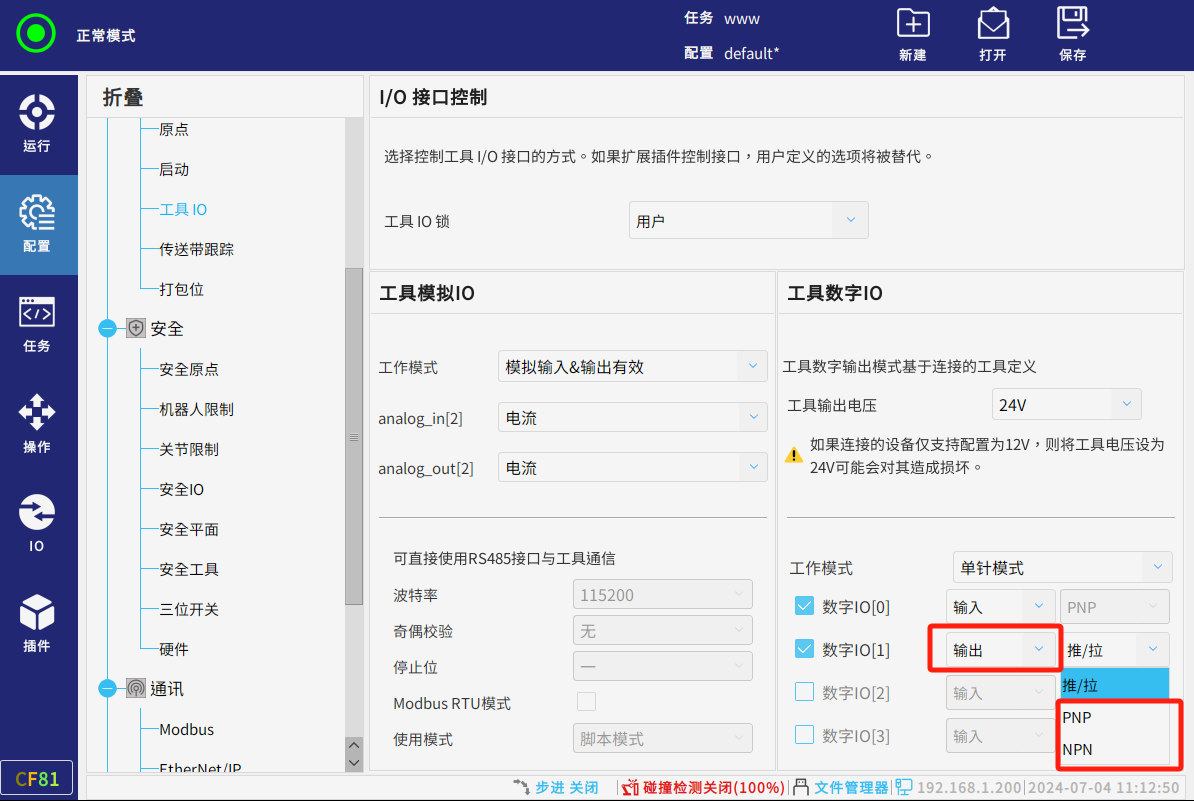
數字IO輸出可在工具IO配置PNP或NPN模式
2.5工具模擬輸出
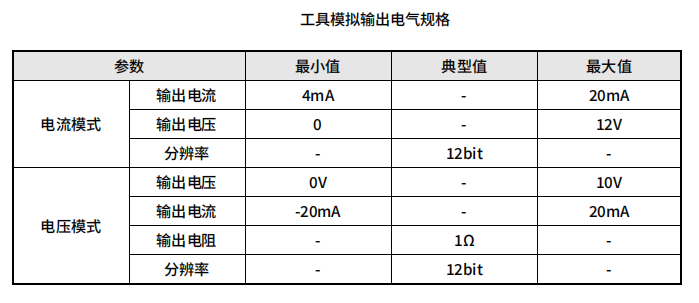
工具模擬輸出為非差分輸出。電氣規格如表:
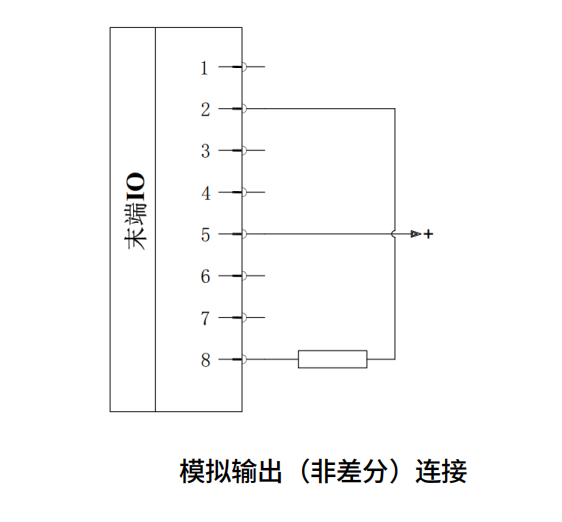
下面舉出關于如何使用模擬輸出的示例:使用工具模擬輸出,本例說明了帶有非差分輸出的模擬信號連接方法:
2.6工具通信 IO
工具模擬IO通訊可配置為SUART模式、輸入有效、輸出有效、輸入輸出有效四種。
當設置為模擬量時可設置為電流模式或電壓模式。

當需要使用末端 RS485 接口與執行器通信時,需要在示教器工具 IO 界面下進行配置,具體配置路徑為:“工具模擬 IO>工具模式”,選擇 USART 模式,并根據執行器實際參數配置波特率等參數。
Modbus RTU 模式為可選項,默認是 RS485 模式;若勾選,則是 Modbus RTU 模式
使用模式分為腳本模式和Daemon模式:
腳本模式:通過腳本發送數據進行工具通訊。
Daemon模式:啟用接口 ttyTCI0,通過api實現工具通訊;可以理解為用戶通過插件進行工具通訊。
從在機器人控制器上寫入發送數據到數據在 RS485 上開始發送,延遲范圍為 2ms 到 4ms。從在RS485 上開始接收數據到機器人控制器收到數據并開始處理,延遲范圍為4ms。
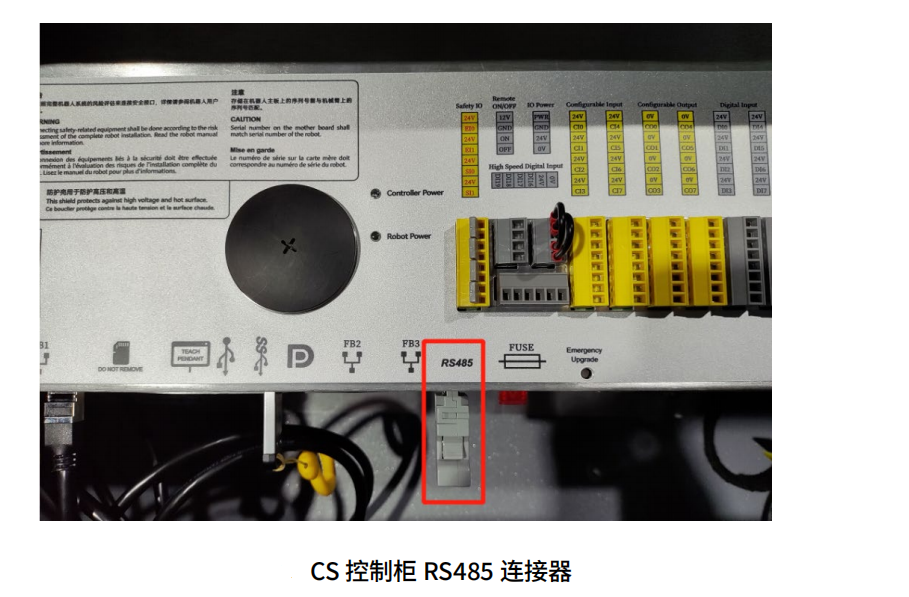
2.7CS控制柜485接線
用戶可以通過將 RS485 設備連接到圖所示的連接器來從控制柜執行串行通信。為了能在控制柜中設置 RS485 連接器,必須拆掉串口連接器,并將 RS485 線焊接到黑色連接器背面的金屬觸點
黑色塑料裝置的正反面分別標有 PIN“1 3 5”和“2 4 6”。PIN3 應焊接到 485-,PIN4 應焊接到 RS485+。該接口支持的最大波特率為 500Kbps。

3. 常見問題解答
3.1機器人末端485通訊和控制柜485通訊有何區別?
除腳本通訊指令不一樣外沒有區別。
3.2機器人拍下急停的時候末端還能正常供電嗎?
CS-v2.11版本添加了CS 急停時移除工具IO輸出電源以及輸出IO信號的更新。
請先將機器人版本升級到CS-v2.11版本(已發布)
機器人進入急停狀態,末端立刻停止供電輸出,如果此時設置了工具IO數字輸出、模擬輸出,按下急停后,會全部置為低狀態(數字輸出為低、模擬輸出為最小值),此時仍然可以通過總線、界面、腳本的方式對IO狀態進行修改,但不會立即生效,需要等急停狀態解除后,才生效。
解除急停后,IO狀態自動恢復為用戶最后設置的狀態。
專家模式->實驗室功能中有急停時不關閉工具輸出的選項。























