











CS機器人碰撞靈敏度介紹
1. 簡介
協作機器人具備碰撞檢測功能,當機器人本體上電外力超過用戶安全設置的正常受力范圍時,機器人本體自動停止,以防機器人或操作人員碰撞受傷。而碰撞靈敏度是協作機器人在安全方面的一個特色。當機器人開啟碰撞檢測后,可以設置不同的碰撞靈敏度,以便更安全、靈活地適應不同的工作場景。
2. 如何設置靈敏度
注意,以下三個方法均可改變碰撞靈敏度,優先推薦使用方法一。非專業人員不建議使用方法二和方法三。
2.1. 方法一:

用戶可通過點擊碰撞檢測按鈕選擇打開或關閉碰撞檢測功能,還可以根據需要拖動右側的進度條選擇合適的碰撞靈敏度。在拖動過程中,界面不會實時更新數據。一旦松開拖動條,界面就會顯示當前最新的碰撞靈敏度。
2.2. 方法二:
連續點擊示教器右上角紅色框位置,輸入密碼“elibot”進入開發者模式。

在力控參數欄目,也可修改碰撞靈敏度。修改完成后,點擊退出即可。

2.3. 方法三:
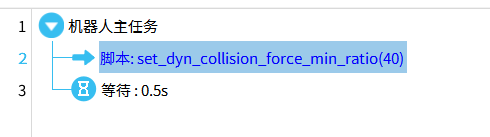
也可通過腳本的方式,在程序運行時修改碰撞靈敏度。
腳本代碼“set_dyn_collision_force_min_ratio(25)",括號里的數值代表預設的碰撞靈敏度,范圍為:10-100.
值得注意的是,如果使用方法三設置碰撞靈敏度,該值只會在開發者模式里面顯示,不會在示教器界面下方的碰撞檢測實時刷新(重新點擊碰撞靈敏度界面,再關閉,才會刷新)。
3. 常見問題解答
3.1. 如何理解碰撞靈敏度?
機器人開啟碰撞檢測后,靈敏度設置的越小,代表機器人越靈敏,觸發機器人“碰撞檢測報警”所需要的力便越小。
3.2. 在使用過程中,應該設置多少的碰撞靈敏度?
通常是設置30%-50%這個區間。但是我們的使用場景是靈活多變的,根據不同的場景需要,或者末端工具比較特殊時,此時我們可以根據需要把該靈敏度設置地更大。比如說當負載特別大時,或者工具重心距離末端法蘭特別遠時。
3.3 如果靈敏度設置了50%,機器人此時能有多大的力?
機器人在運行過程中,承受的力受多個因素的影響。比如說機器人的運行速度,負載的大小,工具的形狀是否特殊導致重心特殊等等。靈敏度設置50%,只能表明,機器人在當前的配置下,承受力不能超過某個上限。


























