











CS機器人縮減模式,安全平面及軟限位
1. 安全密碼設置
安全密碼可防止對安全參數(shù)配置進行未授權的更改。在使用安全功能配置之前,必須先設置安全密碼。
注意:如果沒有應用安全密碼,將會提示設置安全密碼。
1.1 操作步驟
1. 點擊艾利特圖標,進入設置界面。
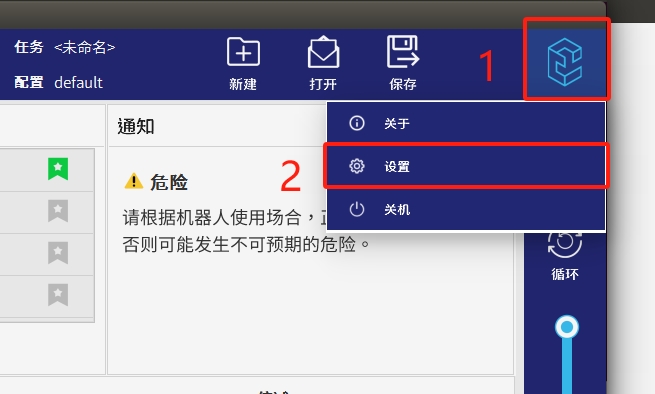
2. 設置安全密碼
選擇“設置> 密碼> 安全密碼”,通過設置安全密碼來解鎖安全配置相關參數(shù)。設置好安全密碼后點擊應用即可。

2. 縮減模式
2.1 功能介紹
1. 縮減模式是艾利特機器人的安全功能之一,他相對于正常模式而言,指機器人在運動過程中,一旦觸發(fā)該模式,機器人會按照設定的速度,動量,功率等來運行,具體的參數(shù)設置可以通過“配置---機器人限制”中來設置。
2.2 參數(shù)配置
1. 修改縮減參數(shù)。
機器人限制界面有4個配置選項:最低限制、最高限制、次最低限制、次最高限制,供用戶可選擇。注意:在設置機器人限制參數(shù)時,正常模式下的數(shù)值要大于縮減模式下的數(shù)值。

2. 如果想要自定義縮減參數(shù),需要在安全IO里面先設置縮減模式,可參考本文下一章節(jié),否則無法自定義修改縮減數(shù)。
若不存在觸發(fā)縮減模式的安全平面,即安全平面中“限制”未配置為“觸發(fā)縮減模式”,或安全 IO 中不存在配置為“縮減模式”的可配置輸入 IO,縮減模式的參數(shù)無法修改。
3. 設置縮減參數(shù)。

參數(shù)說明:
● 停止時間:限制機器人從運動到停止需耗費的最長時間
● 停止距離:限制機器人工具從運動到停止可移動的最大距離
● 工具速度:限制機器人工具移動的最大速度
● 肘部速度:限制機器人手腕移動的最大速度
注意:在設置機器人限制參數(shù)時,正常模式下的數(shù)值要大于縮減模式下的數(shù)值。
4. 如果機械臂進入縮減模式,右上角會變成黃色指示按鈕,機械臂末端法蘭指示燈會變?yōu)榫G藍交替燈狀態(tài)。


2.3 應用類型
2.3.1 安全平面
縮減模式的應用場景之一是安全平面配置縮減模式的功能,具體功能參考“3. 安全平面”。
2.3.2 安全IO
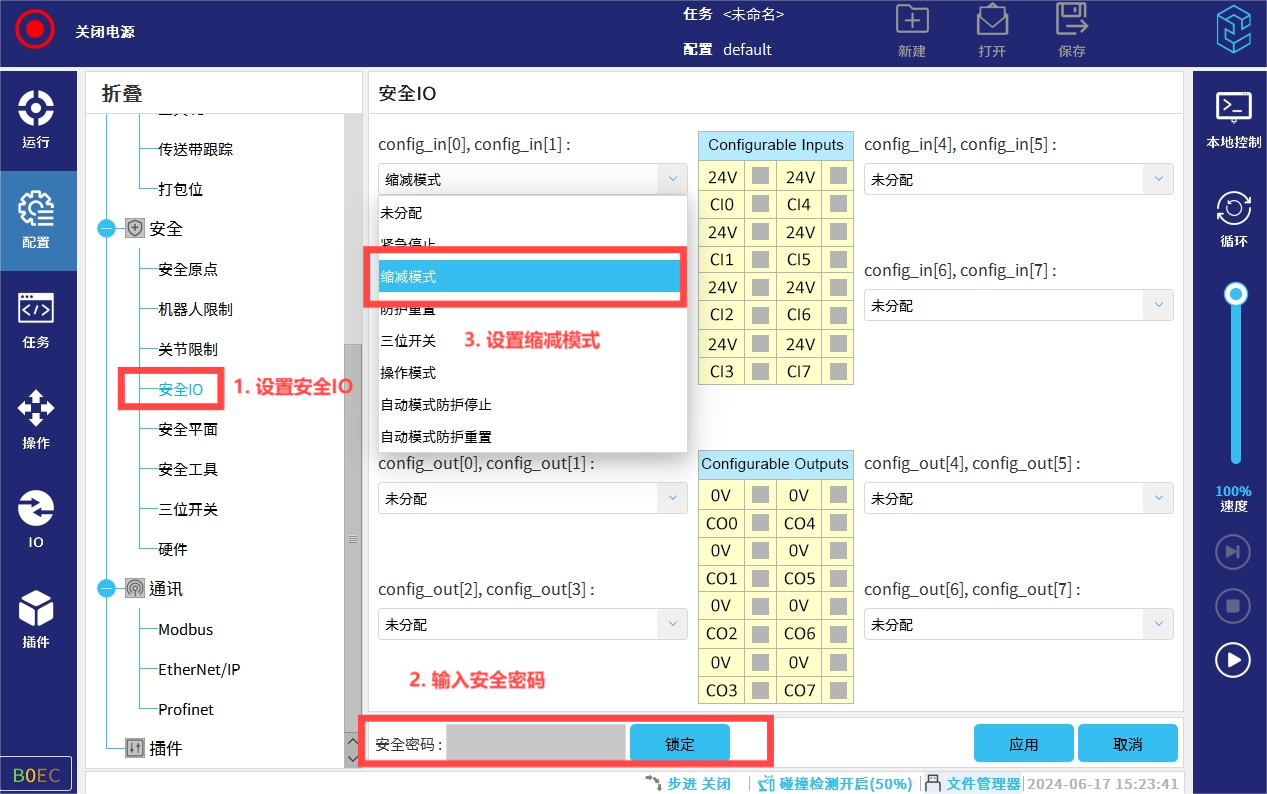
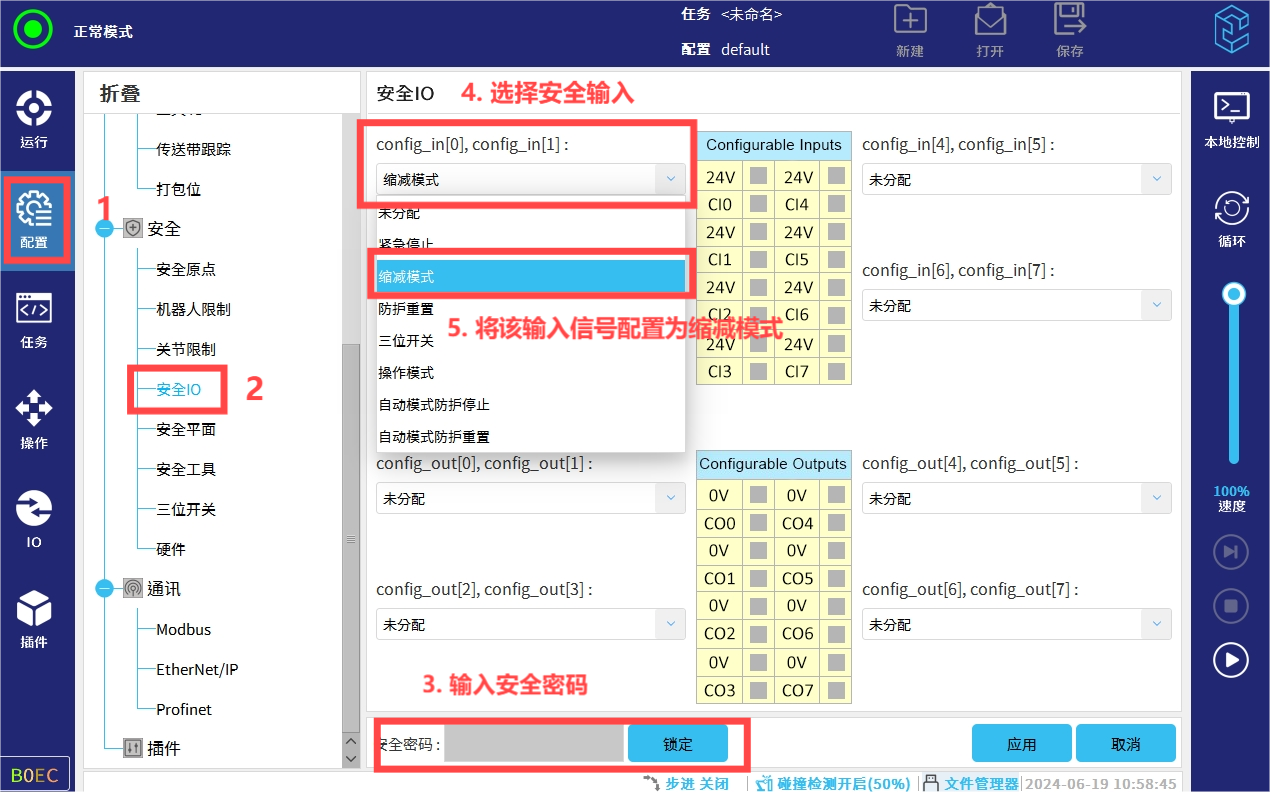
縮減模式的應用場景二是在安全IO功能配置界面的安全輸入/輸出選項中,可以選擇配置縮減模式信號,以實現(xiàn)不同的功能。
安全輸入縮減功能配置,在<配置-----安全io-----安全輸入config_in[0~7]-----縮減模式>。該功能的主要作用是外部控制安全輸入信號來使機械臂進入縮減模式。選擇輸入信號為“縮減模式”,低電平有效。當輸入信號都為低電平時,機器人為“縮減模式”;當輸入信號為一高一低時,機器人會發(fā)出安全報警;而都為高電平,機器人為“正常”模式。
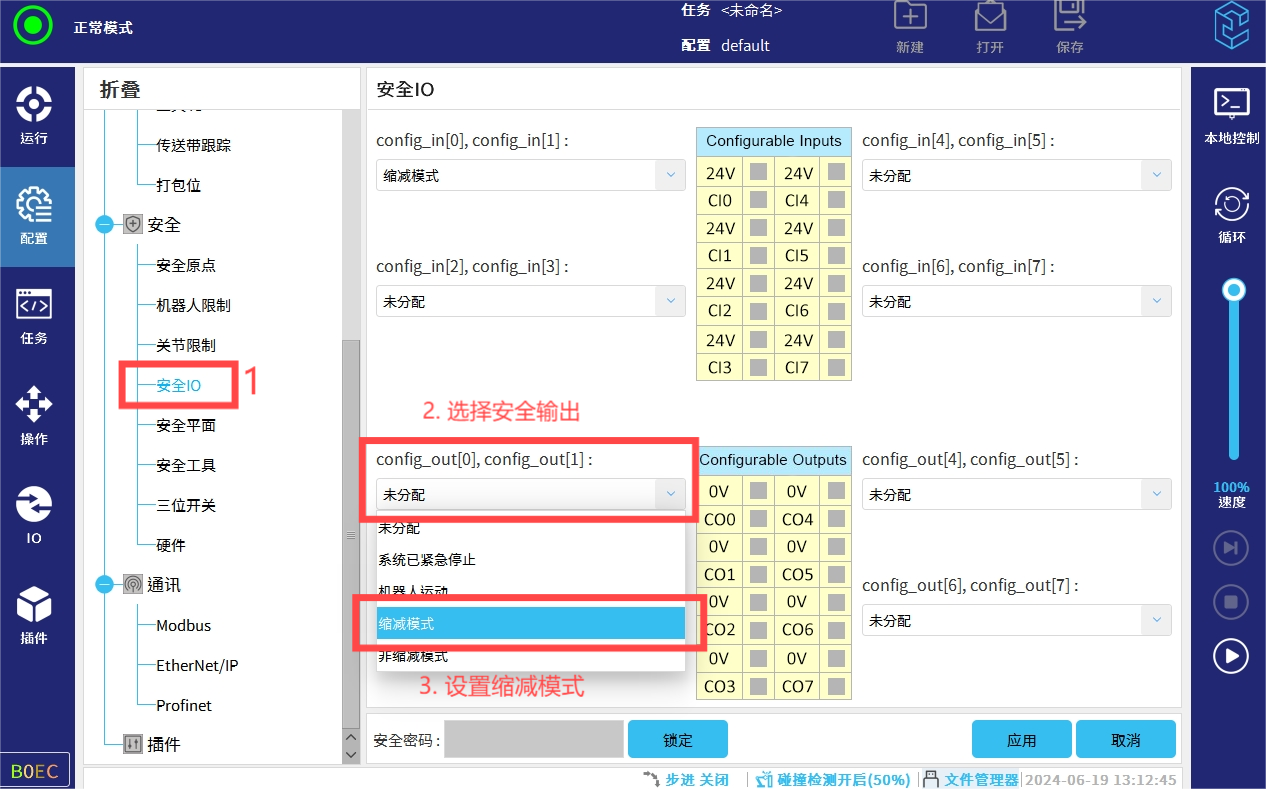
安全輸出縮減模式配置,在<配置-----安全io-----安全輸出config_out[0~7]-----縮減模式>。該功能的主要作用是當機器人本體處于縮減模式,或安全輸入配置了“縮減模式”輸入且當前信號為低電平時,將發(fā)送低電平信號;否則信號為高信號。
3. 安全平面
3.1 功能介紹
安全平面是艾利特機器人安全功能之一,所創(chuàng)建的安全平面可以限制機器人的工作空間。用戶最多可定義8個安全平面用來限制機器人工具和肘部。安全平面的配置是基于坐標系來進行的。配置安全平面前,我們建議您創(chuàng)建用戶坐標系。安全平面只限制機器人本體的工具和肘部,對機器人本體的整體限制無影響。
3.2 操作步驟
要設置安全平面需要先設置一個坐標系,因為安全平面是基于你設置的坐標系的X,Y平面的Z方向平移來確定具體位置的。用戶坐標系的設置請參照用戶手冊上面設置。

2. 輸入安全密碼,進入安全平面設置界面。
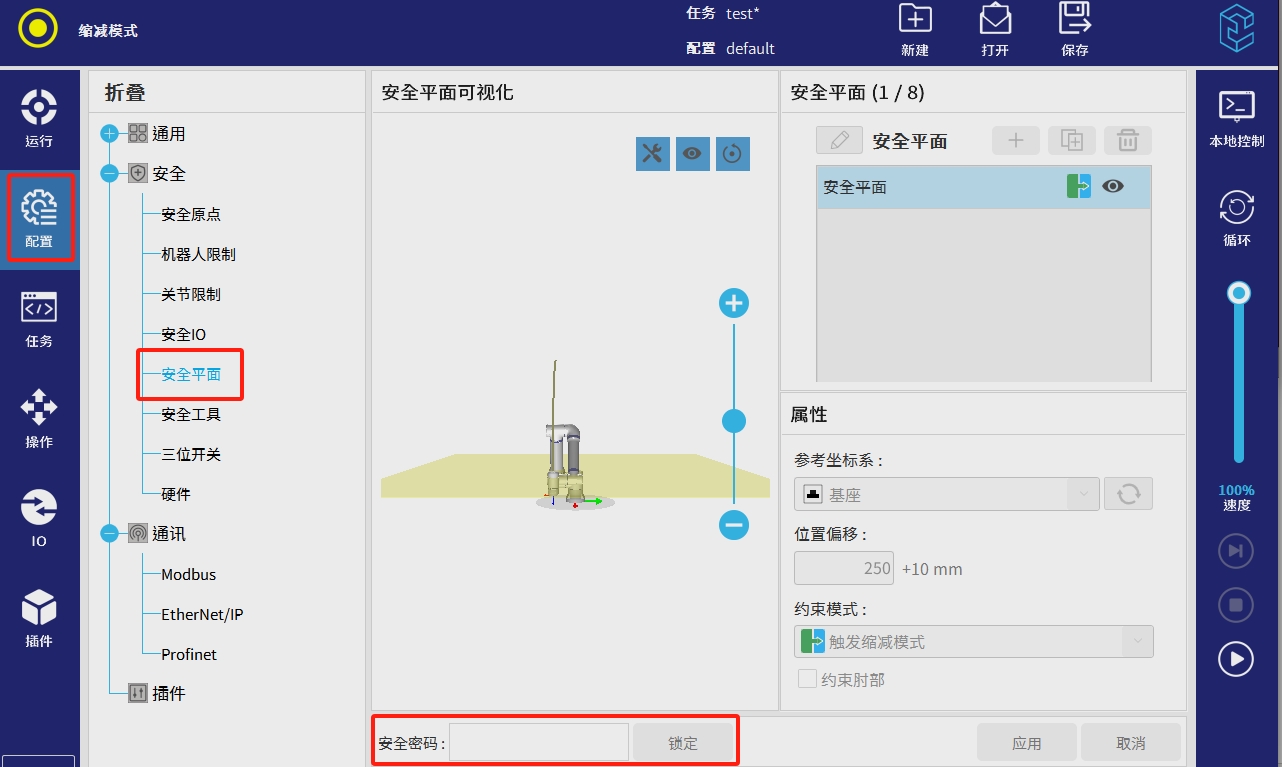
3. 添加新的安全平面,一共可以設置8個安全平面,選擇坐標系。

4. 選擇好之前建立的坐標系或者基坐標系,通過位置偏移來確定平面位置,該位置偏移是通過增加或者減小該坐標系的Z軸坐標來實現(xiàn)平面位置的偏移。該平面的Z+方向是正常區(qū)域,Z-方向是限制區(qū)域,機械臂工具中心點到達該平面及該平面Z-方向區(qū)域會觸發(fā)相應的約束模式,縮減模式或者防護停止。如果機械臂進入防護停止,會自動進入安全恢復模式,手動把機械臂的工具中心點移動到Z+方向上面,機械臂才能再次正常使用。

注意:位置偏移后面的參數(shù) “ +10mm ” 的意思是機械臂工具中心點靠近安全平面10mm處就開始觸發(fā)所設置的模式了。
5. 設置約束模式,即機械臂末端法蘭上工具坐標系觸碰到該平面觸發(fā)的功能,一共有4個模式。用戶可以為每個安全平面配置約束模式。這4個模式的作用如下:
● 禁用:在該狀態(tài)下,安全平面從不激活;
● 正常模式有效:機器人處于“正常”模式時,該安全平面生效。機器人工具或肘部接觸或超出安全平面時,機器人保護性停止;
● 縮減模式有效:機器人處于“縮減”模式時,該安全平面生效。機器人工具或肘部接觸或超出安全平面時,機器人保護性停止;
● 正常&縮減模式有效:機器人處于“正常”模式或“縮減”模式時,該安全平面生效。機器人工具或肘部接觸或超出安全平面時,機器人保護性停止;
● 觸發(fā)縮減模式:機器人工具或肘部接觸或超出安全平面,系統(tǒng)切換至縮減模式。
注意:若勾選“約束肘部”后,安全平面將會限制機器人本體的肘部。可不勾選肘部,按需而定。
4. 軟限位
4.1 功能介紹
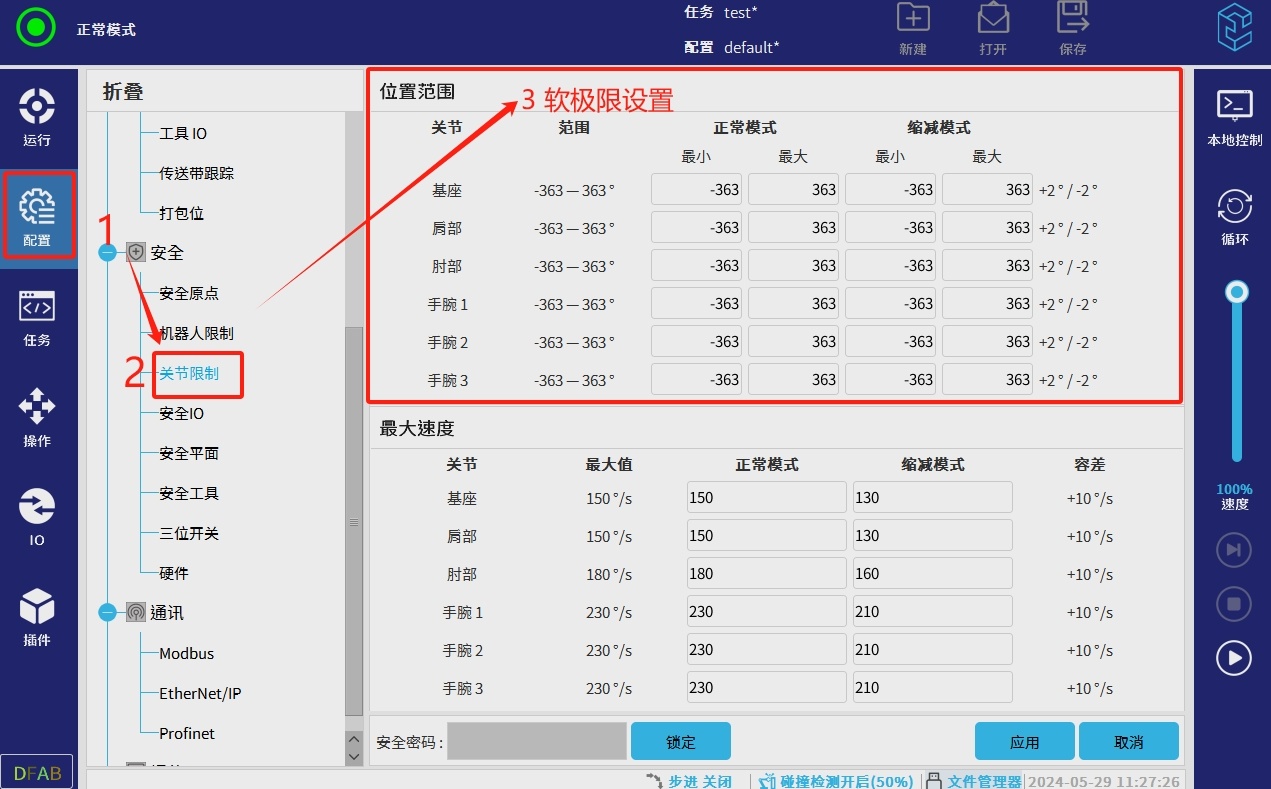
CS系列機械臂中,關節(jié)限制用來限制關節(jié)空間中每個機器人的關節(jié)運動范圍和關節(jié)最大角度。
軟限位是機械臂的各關節(jié)都可以正負旋轉360度,但是3關節(jié)受限于自身結構限位,無法達到360度。3關節(jié)運行超過160度,腕關節(jié)會撞在1軸和2軸上面,調(diào)試人員須知。同時軟限位還區(qū)分正常模式模式跟縮減模式下的范圍和關節(jié)速度上限設定,不建議用戶修改。
5 安全工具
5.1 功能介紹
安全工具是以工具tcp為圓心,設置一個半徑為0-300mm虛擬安全球體,機械臂在運動過程中,如果這個虛擬球體表面接觸到安全平面,會觸發(fā)安全平面所設置的約束模式,最多可設置2個安全工具。
5.2 操作步驟
1. 我們在創(chuàng)建安全工具之前首先要建立好正確的TCP工具中心點,在配置-----TCP中創(chuàng)建新的tcp。如下圖:

2. 建立好TCP后,我們就可以去創(chuàng)建安全工具了,步驟如圖所示:


半徑的距離是0-300mm之間。設置完成安全工具后一定要點擊應用保存。點擊應用的時候機械臂會下電,是正常的。

3. 設置好后我們可以看到機械臂的TCP工具中心點處會出現(xiàn)一個綠色的圓球,說明創(chuàng)建安全工具成功,如上圖。之后我們就可以安全工具和上面所講的安全平面一起配合使用了。機械臂安全工具球面碰到或者到達安全平面后,會觸發(fā)安全平面所設置的約束模式。


























