











EC機器人外部啟動時序
1.簡介
用PLC/按鈕或其他外部設備輸入的IO信號對機器人進行啟動、停止、復位等控制, 這被稱作外部啟動。
2.外部啟動時序
①首先確認機器人已經通電開機(需人工)
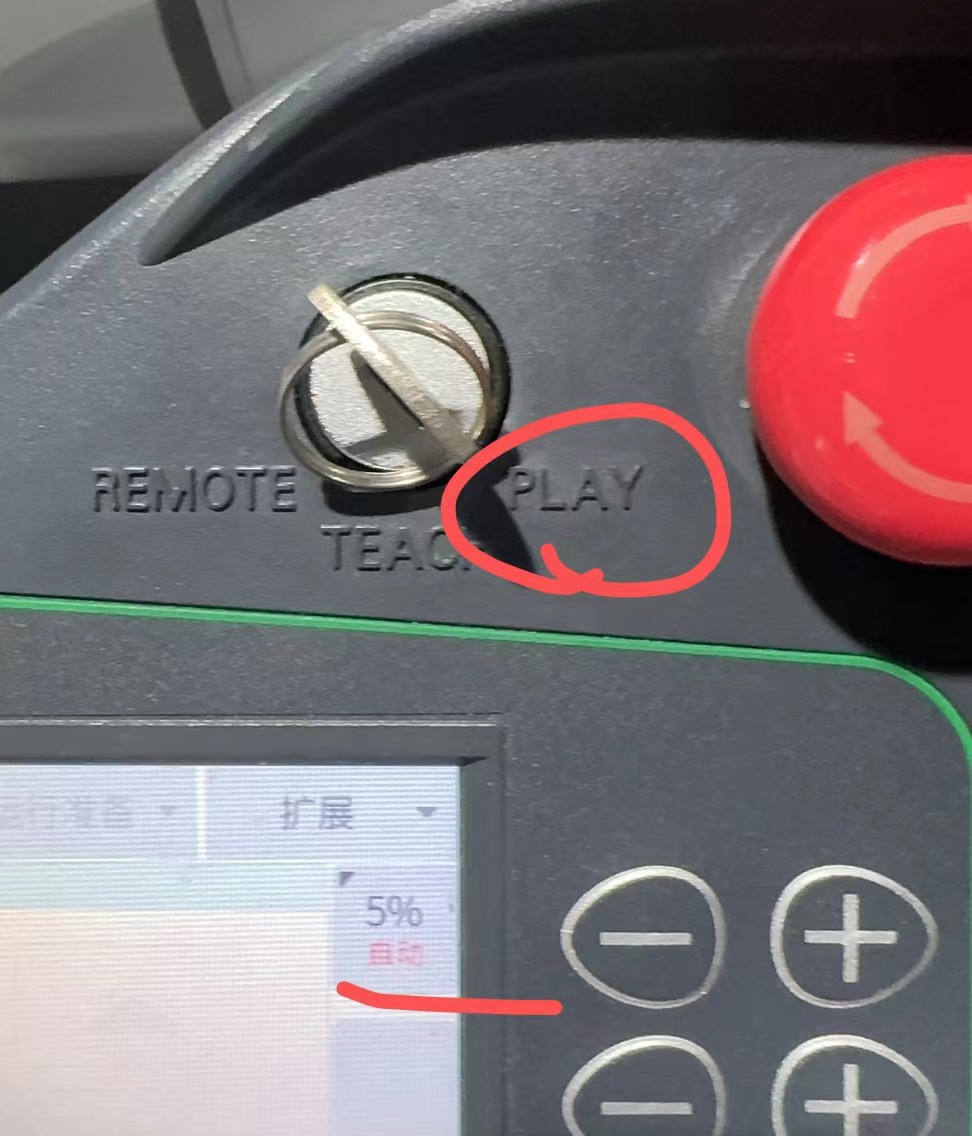
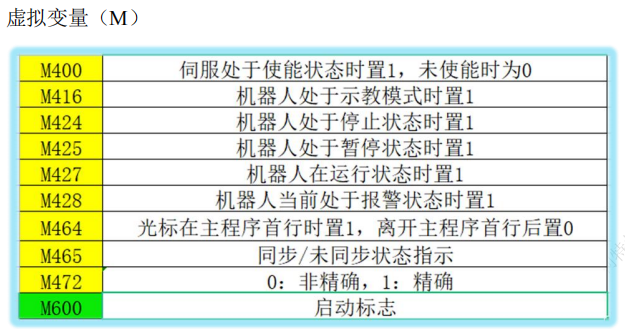
②示教器鑰匙處于play即自動模式(需人工)(M417)

③獲取機器人報警狀態(M428),如果有報警則清除報警(S4)

④判斷機器人程序指針是否處于程序首行(M464),按需求可回主程序首行(S6)
(暫停后接著繼續運行無需回首行)

⑤判斷機器人是否伺服上電(M400),如果未上電則伺服上電(S3)

⑥判斷機器人是否處于精確模式(M472),如果不處于精確模式則編碼器標定(S22)
(編碼器標定機器人各軸會微動,但處在非精確亦可外部啟動,但是對精度有影響,不建議使用,機器人可以先移動到安全區域再進行編碼器標定)

⑦外部啟動(S1)
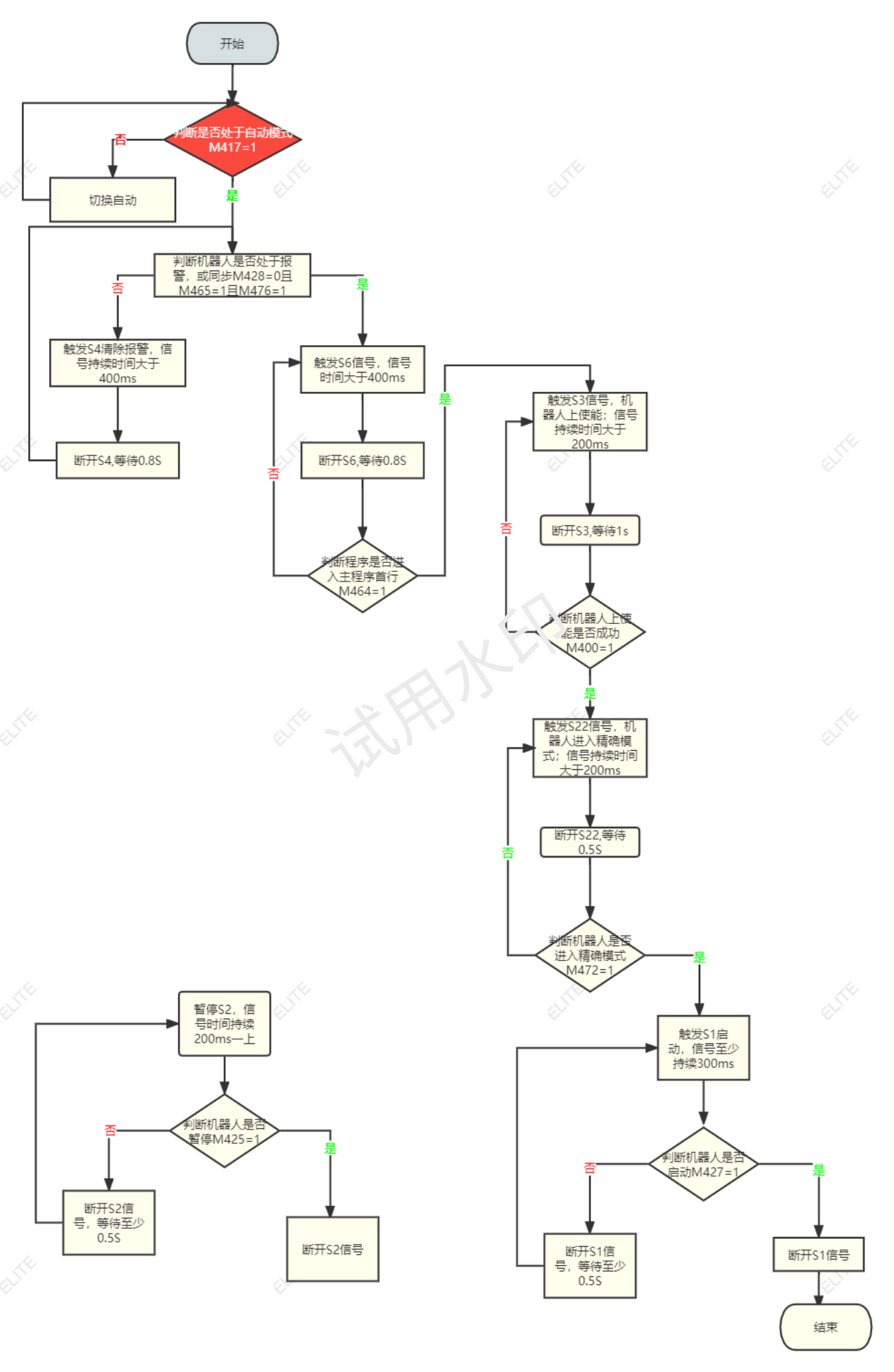
注:圖解
3.常見問題解答
①M417等為機器人內部虛擬輸出可映射為機器人狀態,在示教器監視--輸入輸出--虛擬輸出頁面可查看;
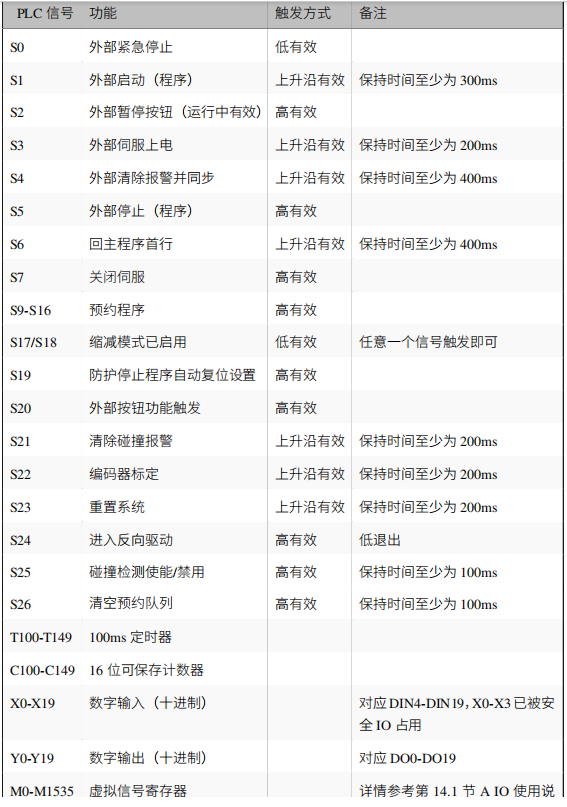
②S1等代表線圈,具體信號映射可見用戶手冊--第十章用戶plc的表10-1
③編碼器標定過程中機器人會輕微轉動每個關節,如果考慮干涉問題可以先外部氣動s1運行程序回原點,停止程序后再編碼器標定。
4.示例
示例1.
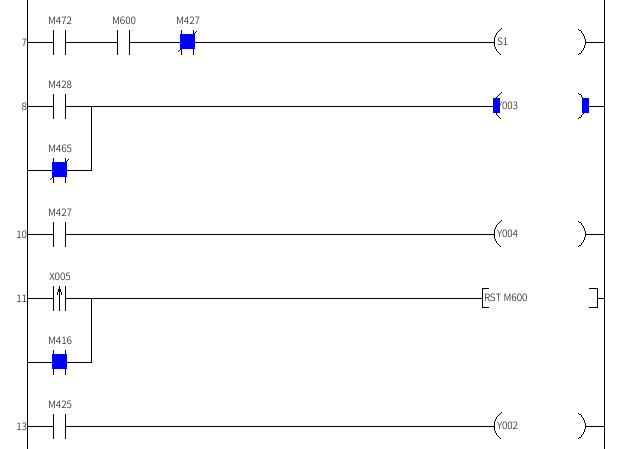

詳細說明:
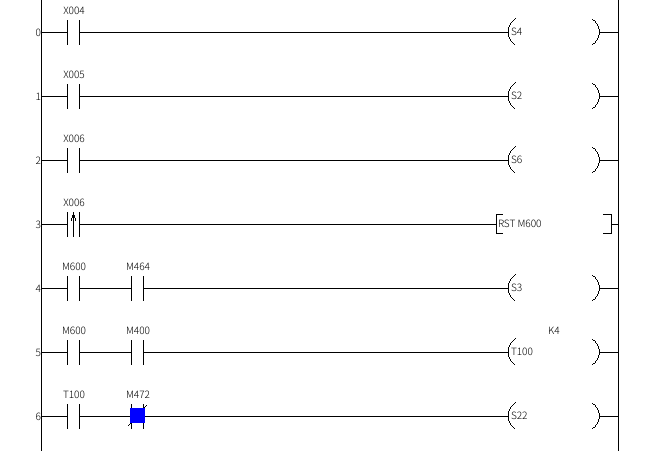
X004信號觸發清除報警(保持時間至少為 400ms)
X005信號觸發外部暫停
X006信號觸發會程序首行
X006由低電平切換到高電平使M600=1
M600=1且光標在程序首行觸發伺服上電
M600=1且伺服已經使能啟用定時器T100k4計時0.4S
定時器T100計時0.4S完成且機器人在精確模式啟動編碼器標定功能
機器人在精確模式且M600=1且機器人不在運動則外部啟動
機器人有報警或不同步則輸出Y003=1(提示報警)
機器人在運動則輸出Y004(提示機器人運動狀態)
X005由低電平切換到高電平或鑰匙切換到手動模式則使M600=0
M425=1則Y002=1(機器人暫停狀態位)
M424=1則輸出Y001=1(機器人停止狀態位)
示例2.
需要用到的信號:
DI4:啟動
DI5:暫停
DI6:復位 長按復位按鈕初始化回原位
DO2:黃燈(暫停中)
DO3:紅燈(報警中)
DO4:綠燈(運行中)


主程序設置--運行準備-主程序-選擇主程序名稱-設置
設置主程序后可通過信號進入主程序,不需要在示教器上選擇主程序

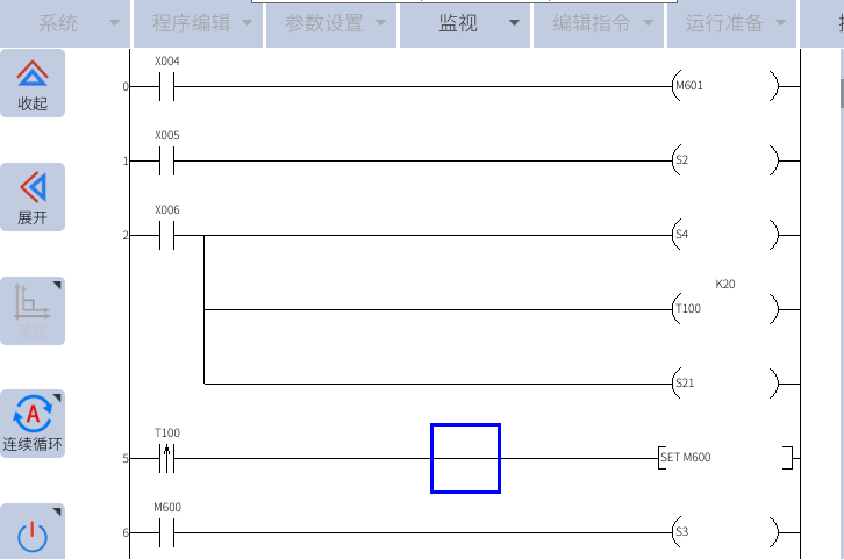
用戶PLC編寫
第 0 行:按下啟動按鈕(X004)為“1”M601有信號,M601關聯啟動S1。
第 1 行:按下外部暫停按鈕(X005)為“1”,(S2)為“1”,機器人外部暫停。
第 2 行:按下復位按鈕(X006)為“1”,(S4)和(S21)為“1”,清除報警和碰撞報警,長按復位按鈕,T100計時2S。
第 5 行:當檢測到T100上升沿,置位M600。
第 6 行:當(M600)被置位為“1”,(S3)為1,伺服上電。
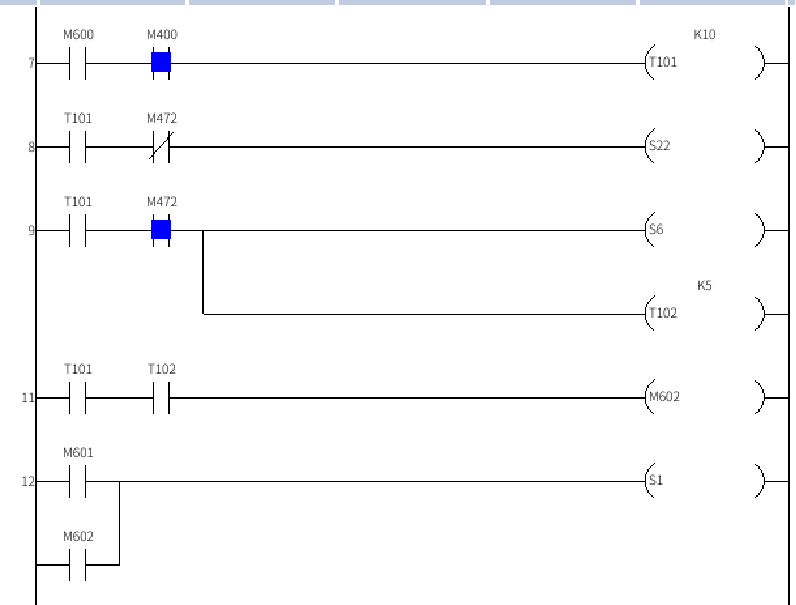
第 7 行:M600有信號,M400(伺服上電)有信號,T101計時1S。
第 8 行:T101計時到達后且M472(精確模式)沒有信號,(S22)為1,編碼器標定。
第 9 行:T101計時到達且M472(精確模式)有信號,(S6)為1 回主程序首行并T102計時0.5S。
第 11 行:當T101計時到達和T102計時到達,M602為1”。
第 12 行:當M601或者M602為1,S1為1,機器人啟動。
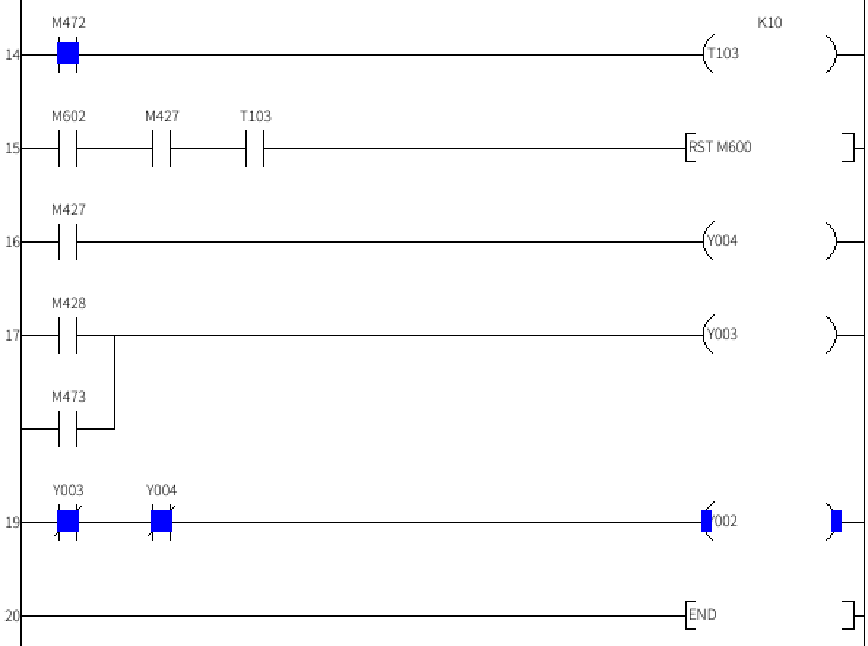
第 14 行:M472(精確模式)計時1s。
第 15 行:M602有信號,M427(運行狀態)有信號且T103計時到達復位M600。
第 16 行: M427(運行中),Y4為1,亮綠燈
第 17 行: M428(報警中)或者M473(初始化狀態),Y3為1,亮紅燈
第 19 行:紅燈和綠燈不亮,就亮黃燈
測試運行
1.打到自動模式
2.長按復位按鈕,初始化
3.點擊啟動按鈕
5.附錄
示例用戶plc文件
plc_user.dat
plc_user (2).dat


























